
はい、ゴールデンウィークに突入しました。

久々に機械加工。
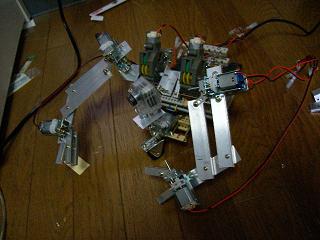
カメラが自機の腕の先を見る事ができないと言う致命的な欠陥があるため、改造します。

分離!

先ほどの加工で作った部品で組み立て…どうしてこう、当初の予定通りに部品がはまらないんだ!?

そういうわけで、どんどんバラす。

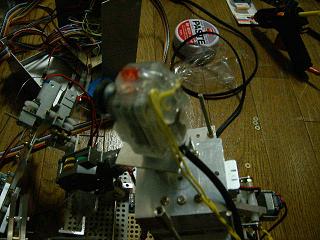
何とかカメラをくっつけて、
テスト開始!
…うーん、曲がれない。

えーい、ばらばらー!

ばらばらー!!
曲がれない!
前進後退しかできない!!!

うーん、ものをつかめるようになった後からこういう問題が噴き出すとはなぁ。
結局、キャタピラにステアリングをつけて曲がる案は没、再びキャタピラタイプにしてしまおう。
何故か左右のキャタピラの動きが一致しないが、曲がれないよりはましだろう。
制御回路が間違っているのかなぁ?
…って考えていて、ひとつ気が付いた。
左右のキャタピラが同時に動かないのは、モーターに供給する電力が不足しているからでは?

日付が変わって、ひとまず、在庫整理をしよう。

本当、使い道の分からない電子部品が出土する。
ICは型番と対応するデータシートがないとただのムカデっぽい物体でしかないからなぁ。

今回も追加で加工だ!
後でどうにも設計変更できるよう、今度からはぶすぶす穴をあけまくるぞ!

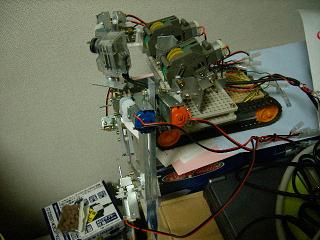
しょうがないから、頭部は本体の腕の後ろに、腕先を見下ろせるようにして配置するぞ。

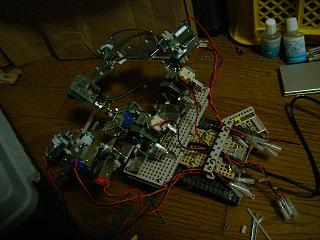
上の写真だと見づらいかもしれないから、こっちのほうがいいかな?
そういうわけで動作テスト。
今回はモーターの電源供給はACアダプタを使うぞ!
俺が鬱になる前に買ったまま、全く使わずに眠っていたやつだ。
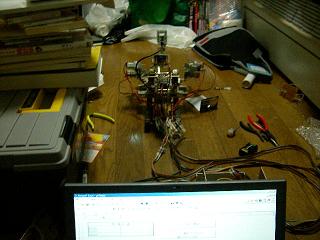
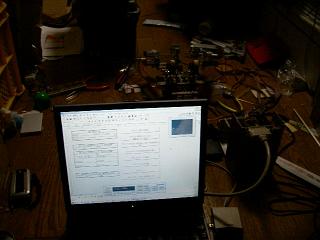
で、起動。

…まっすぐ進んだ。
この写真からじゃ分かりにくいのだが、9ボルトの電池ではまっすぐ進めなかったのが、ACアダプタの電力でまっすぐ進めるようになったんだよ!

うーん、やはり今までのものは電力不足だったんだな。
そして、今度はカメラのUSBケーブルの短さの事を考えないとな…。
まぁ、その他の事が一段落してからでいいだろう。
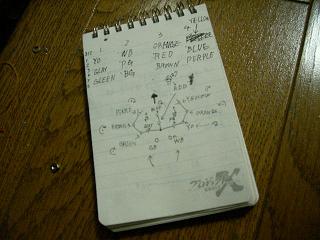
どのように命令するとどこのモーターが動くのか、メモしていく。
後で動かしやすいようにプログラムを作るのだ。
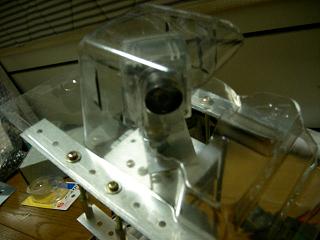
それと平行して、頭部カメラのカバーを作るぞ!
コンビニをうろついて、食べ物を手にとってはどのような容器がこのカバーにふさわしいかと悩んでいたのだが、結局、先のACアダプタのカバーを使う事になった。

と、ここで一休み。

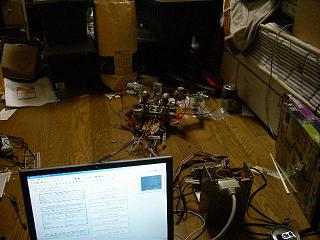
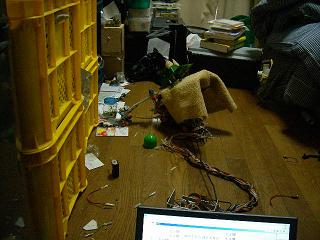
平行して組み立てをしているロボザックと並べた写真。
…まぁ、物がつかめる事と、今の時点で移動できる事が強みかな。
さて、俺は二足歩行を実現させる前にひとまず、このミッフィーカーを作るつもりでいたのだが…。

この間、吉祥寺に寄った時に買った布がある。
これを使おう。

ちゃんとこのときのために布用バサミも買ったのだ!

とりあえず、ばさっとかぶせる。
もうこの時点でミッフィーじゃないけれど、まぁ、あれは「仮」と書いてあったからなぁ。

頭部カバーの塗装。

ここで高分子樹脂半田を出す「グルーガン」の登場だ!

布と、カバーの骨格になるダンボールを接着。
さらに、カメラもLEDをくっつける…。
どうせ、どうにも調子の悪いカメラだったからなぁ…。

耳をつけてみる。
…ロボタック?

制御ボックスに、ACアダプタを繋ぐ部分を取り付けたぞ。
うーん、あっちをやったりこっちをやったりの俺。

さーて、カメラのほうはレンズをテープで保護して、塗装したのだが…。

この状態で、先ほどくっつけたLEDを光らせると、

このようになるはずだ!
って言う、上の画像は想像図。
そして現実は、

いやあああああああああああああああああああああああああああ!!!!
やめとけばよかったかなぁ…?
もっとも、盆からぶん投げた水、と言う状態だけれど。

とりあえず、組んでみよう。

一応、モノアイっぽくなった…と信じたい。
今までのプログラムだと、操作がし辛かったので、改めてプログラムを作るぞ!

おりゃー!

うおりゃー!!!

お…りゃ…。
……。

これが取りたい。

ちなみにこれが、カメラから見た写真。

くそう、少し下がって体勢を立て直すぞ。

このやろ!

おのれ!

…!…!

!

やたあああああああああああああああああああああああああああああああああああああああああああ!!!!!

よしよしよしよし、ゆっくりとだが、確実に前進はしているぞ!

ひとまず、片付けるぞ!
寝て起きたら、ゴールデンウィークのおわりまでやらずじまいだったものをやるぞ!

ああ、今日も夜中じゅう、ぶっ通しでやってしまったな。
塗料をもう少し乾かして、お休みだ。