
11月22日
今回はセンサーを追加するぞ!
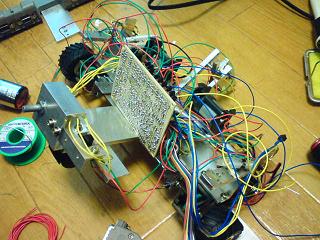
しっかし、その度にネジを外して、配線が根元でちょん切れるのにびくびくしながら配線を追加するのは結構辛いな…色々と考えないとね。
よし何とかできた。

そして管制ユニットのLibletto60を取り付けて、ひとまず配線は完了。

11月23日
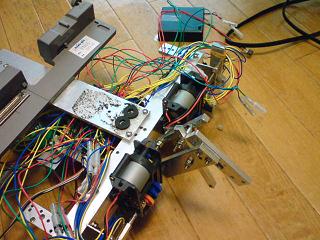
ちゃんと動いているのを確認して、

あとは「単眼」センサーを作ろうとしたのだが、これについてはうまく行かなかったので後回し。

12月7日
とうとう12月に入ったか…。
寝る前にプログラミング。
センサーを使って動作するところを動画にしようとしたのだ。

そして次の日、プログラムが完成した…俺が大幅に手助けしたとは言え、はじめてロボット自ら物体を掴む事に成功した…。