
3月6日:
現在、GE-9のソフトウェアのプログラミング中。
結構長くなりそうだし、途中経過を書いてもあまり面白そうに無いので、他にロボット関連で更新のネタが欲しかった。
というわけで少し前から、更新のネタにと手作りNC工作機械を作ってみようと思ったのだが、使用しているギヤボックスである「ユニバーサルギヤボックス」が、そのギヤボックス本体の歪み具合で性能が大幅に変化するらしく、改めてギヤボックスを選定して、最初から作り直した方が良いという結論になってしまった…。

3月9日:
なので、GE-10をちょこちょこと改造して更新のネタを作ることに決定。
会社の先輩にこのメカの話をしたら「ケンタウロス」という愛称をくれたので、これからは「GE-10ケンタウロス」が愛称である!
そしてその名に恥じぬケンタウロスロボを作る意気込みで頑張るのだ!

3月10日:
これねー、特にエンコーダの製作が面倒なんだよねぇ。
でも、ちゃんと大雑把な図面が出来上がっている分だけ早く製作ができる。

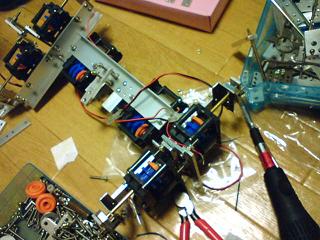
モーターは、開発停止中のGE-11の腕部を失敬した。

3月11日:
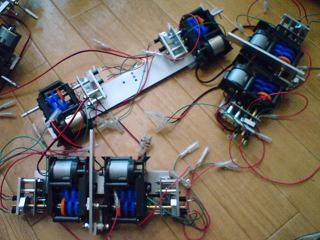
今回も、モーターの配置はこの通り。
3月13日:
仮組をして、うまく取り付けられるかどうかを確認する。

確認はしてみるが…。
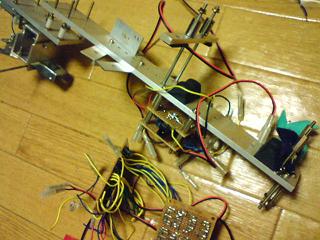
さて、こちらは以前のGE-9のボディだった部分で、こちらも解体して部品取りを行う。

資源は大切にしないとね。
3月14日:
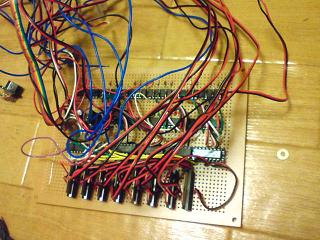
そして電装品であるが、製作失敗で放置されていた制御基盤が、技術力アップのおかげで再生できるようになったぞ!!!

3月15日:
しかも、一度に八個のモーターを制御できる、この日記を書いている時点では最高性能の基盤だ!!!

…ただ、それに取り付ける部品の製作の手間が半端ではない。
一時間以上かけて60個を越える圧着端子をちまちまと接続。
接続型の圧着端子があれば、この後の脱着が、なんぼか楽になるのだ。

3月16日:
そして組み立て開始。

直後、問題が発生…。
左右の足が分離しない一体型にしようとしたのだが、左右の足のモーターの間隔が狭すぎて、写真真ん中に電子部品を入れる余裕が無いのだ。
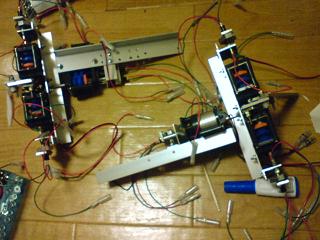
ひとまず、スペア部品があったのでそれをくっつけて、左右の足が分離できるようにしておいた。
左右が分離しない方が、重量軽減や強度向上を見込めるかと思ったが…。
3月20日:
突然ですが、二日前に大学を卒業しました♪
これからも頑張ります、みんなありがとう!
…というわけで、結局腰部分を作り直しました♪
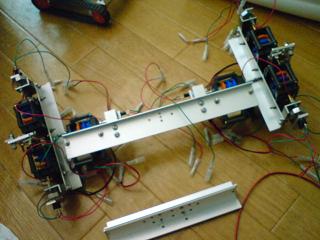
ついに新しい脚部完成!
…ただ、ケンタウロス型ロボにするためにはもう二本分の足が必要だが、これを作るのにものすごく疲れたのと、予算の都合で中止…。

そしてGE-10本体の取り付け場所に悩む。
余談だが、後部に取り付けようとしている管制ユニットのパソコンであるが、GE-9の物とは別の東芝Libletto20でというやつで、キーボードの入力機能がイカれているので使用できなかった…。
3月21日:
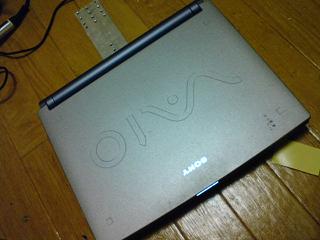
というわけで、管制ユニットはソニーのVAIOに決定!!!
このVAIOに究極大改造を施し、GE-10用管制ユニットとして復活するのだ!!!

ちなみに改造の仕方は、ネジ止めする穴が付いた板(このページの最初の方に映っていたGE-9のかつての本体)にVAIOと「ポートリプリケータ」とか言う、要はIOボードを瞬間接着剤で究極三大合体を行う事によって実現するのである!!!
ちゃんとパソコン自体のメンテナンスもできるように、パソコンのネジ穴にドライバーが通るようにするなどの配慮も忘れてはいないぞ!

3月22日:
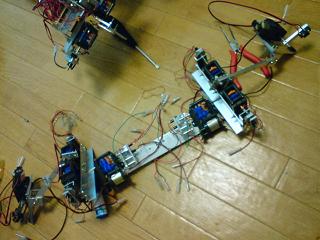
…えー、ということで、一応ケンタウロス型ロボにしました。
なった事にさせていただきました。

3月30日:
…が、それは同時に、現在の状態ではうまく歩けない事も分かってしまったのであった…。
でも、従来に比べれば非常に安いコストで、しかも
ただ、本当に優れているかどうかは結構な額の金を払って技術評価書をもらわないといけないらしい。
出願書類を出したあと、とりあえず一度腕は取り外して、能力測定を始めることにした。

荷物が無い状態だと、VAIOの重みで前足が浮き上がって歩けない。
250グラムの荷重でも、ちょっと無理。

500グラムの荷重で、ようやく脚部が地面に付く。
だが、うまく歩けない理由のひとつは腕部が重いからだけではなく、VAIOの重みのせいでもある事もここで分かってしまった…。
つまり、VAIOを管制ユニットとして取り付けた時点で、脚部が床を蹴って進めなくなってしまったのだ。

でも、この点は脚部に滑り止めをつけて解決できた!
どうやら現時点で1.75キロまでは積載して歩けるらしい。

だが、「歩けるらしい」とは言っても、どうも日光がGE-10の光学センサを誤動作させているらしく、何だか思うように動けないまま荷重テストが終わったのであった…。
というのが、3月30日の公開試験場のネタなのだ。