GE-10
実験機GE-10
「ロボザック」ことRZ-1は、ネジの回しにくい点がそのメンテナンス性をどん底にまで激しく叩きつけているのだが、評価しない点がないわけでもない。
「モノコック構造」って言うのかな…?…モーターにフレームが直付けされていて単純な造りになっている上に、手足の部品の共通化が結構行われているのだ。
これによる利点は以下の通りだと考える俺だ。
- 部品共通化で製造コストが減る
- 軽量化
- 設計の変更による改良がしやすい
と、いうわけで、俺の勤める会社の人たちの意向とかも含めて、素直に脚部をRZ-1の構造を模倣した物を作ることを挑戦してみようと思う。
もちろん、うちの道具では作れない部品もあるし、その辺はうまく折り合いをつけて、自分のできる点で思う存分色々とやってみようと思う。
それから、この方法で本当にうまく行くか分からないので、保険としてGE-7とGE-9は解体せずに残しておく事にして、改めて形式番号を与えてGE-10とするのだ。
と思っていたら、早速現在の持ち合わせた技術では直立二足歩行の実現が怪しくなってきた…。
まぁ、それが分かっただけでも収穫かな?
仕方がないので、とにかく歩行ロボの研究をしよう。
…ってことで、試行錯誤の末、出来上がったのがこれ↓
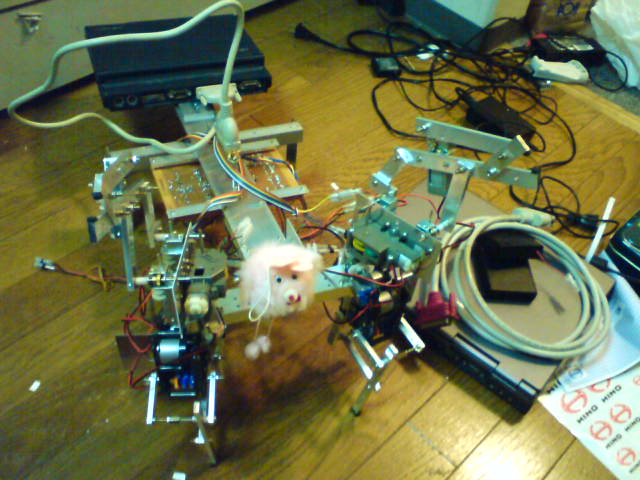
一応、二本の腕と二本の足があって、歩行ロボットである事には違いはないのだが…。
今後実現したいもの
- 二足歩行
- 外部に対する多数のセンサー搭載
- 仏教心理学の実践
- そのほか色々ノウハウをためる
GE-10開発記
GE10製作開始
バックラッシの壁
結局方針転換
ついに二本の腕と二本の足の付いた歩行ロボットが完成しそう!!!
OSが動かない
余裕が無い
究極超パワーアップ
合体してGE-11に改称しました
でもまた復活しました
だいぶ歩けるようになりました
ケンタウロス的ロボになりたい
