
12月1日:
ボーナスももうすぐ入るし、部品もどんどん集める。

加工もじゃんじゃんやる。

12月2日:
そのまま日付が変わって、組立作業を続ける。

余剰パーツでキャタピラ目かも作ってみたり寄り道をしているうちにそろそろ寝ることにする。

電気部品も届いた。
12月5日:
しばらく日をあけて、平日にちょっとづつ加工を進めて組めるところまで組んでみた。
ここで問題発生。
バックラッシって言うやつ、GE-7のときはあまり気にしなかったし、腕の部分もそんなに気にならないのだが、今回組んでみて、ものすごいことに気がついたのだ。
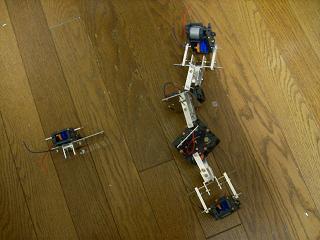
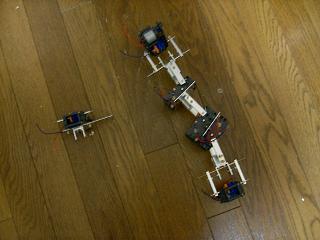
どういう事かというと、直立歩行のロボットを作る際、ギヤボックスの軸のガタを考えないで組むと、上の写真と見比べてほしいんだけれど、全然力を入れなくてもこれだけ曲がるのだ。
これで安定した歩行がすぐに実現できるとは思えないし、この問題の解決をしないといけなくなった…。
なるほど、RZ-1のサーボモーターのバックラッシがないのは、これが理由なのかもしれない…。