12月17日:
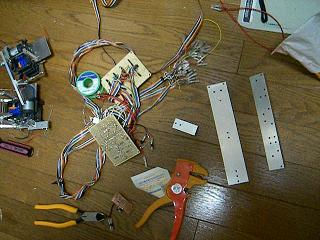
GE-7に搭載していた制御基板を改造して使うことにする。

12月19日:
さらに追加工。

12月23日:
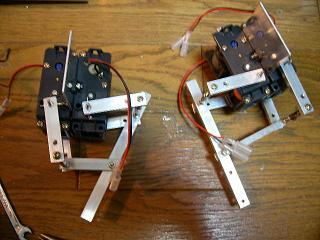
腕の部品を加工…。
それでもって、眠ったままのGE-7から部品取り…せっかく作ったのに、ごめんよ…。

12月24日:
この頃には徐々に新居への引越し作業もやる事に…。

それはそうと、GE-7の腕の部品のギヤボックスを取って、途中まで作った。
12月25日:
この頃から動作テストを開始。
12月28日:
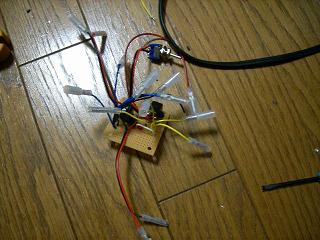
どうも回路の動作が芳しくないので、ここで「三端子レギュレータ」と言う部品を使って、新型の配電盤を製作。
…うーん、いまいちうまく動かない…。

12月29日:
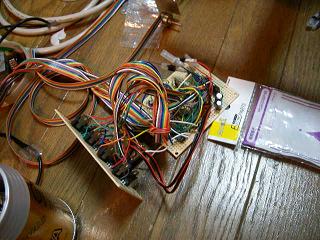
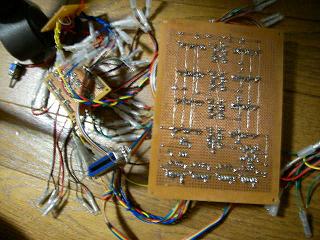
結局、新しく基板を製作することに…。
先の、動作のおかしい基板から一部の部品を取ってきて、くっつける。
それでもって、マメに動作確認。
何だか、去年も似たようなことをしていたな…。
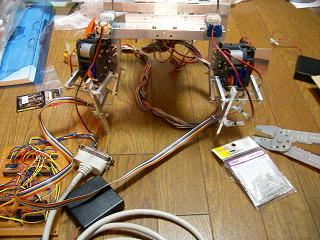
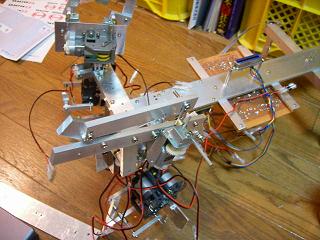
一段落したところで、腕の残りを作る。
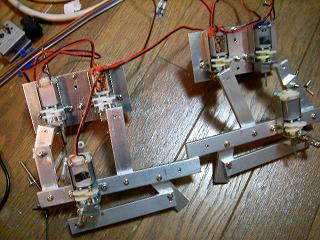
少し可動範囲が小さくなったが、振り上げたりする事ができるはずだ。
12月30日:
腕ができたところで、改めて回路のほうに手を出す。
以前にGE-9にくっついていた回路をとっておいたので、これを付けてしまう。
そして…。
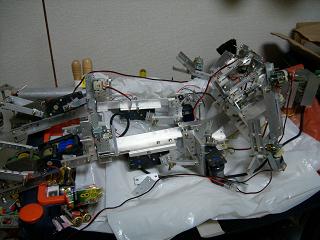
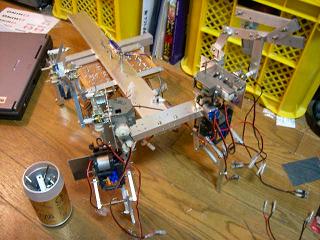
ついに両手両足のついた歩行ロボットの素対がとうとう完成したんだ!!!
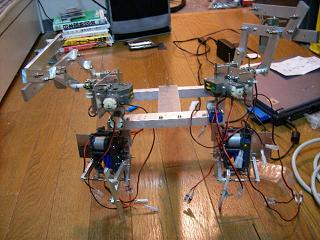
ばばーん!!!
補助輪付きだけどな!!!
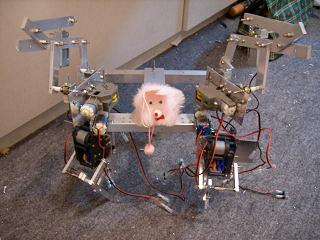
寮祭のときにもらった、ぬいぐるみの顔をくっつけてみると可愛いだろ!!!
可愛いと言え!!!

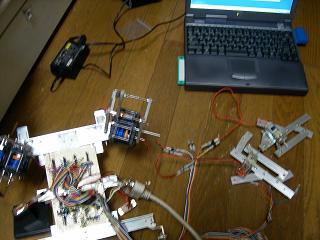
さて、閑話休題、注文していたCFカードと言う記憶媒体と、それからそれをIDEにくっつける部品が届いた。

これを制御コンピュータにくっつけて、OSをインストールする準備だ。

もうひとつ、機械加工のほうでは、新しい基板をくっつける部分を製作中。

機械加工をしつつ、飽きっぽい俺は制御回路の基板のコート剤を引っ張り出す。
この基板に塗ると、ショートや基板腐食の確率が減るらしい。

でも先のスプレーは、俺が鬱になる前に買って、二年以上ほったらかしになって入り口がそのまま固まってしまったみたいで新品のまま使用不能。
改めて買ったコート剤をスプレーのキャップに入れて、そこに刷毛を入れて使う…。
こうして一応、このコート剤のスプレーは基板のコーティングに役に立ったのであった。

12月31日:
いや〜、大晦日か。
今年の加工も終わった。
組み立てをしよう。
しまった、取り付け穴位置を間違えていた…。
仕方がない、追加工だ。
ついでに、脚部を改良する部品も加工しよう…。
組み立てていくとどんどん追加工の必要が出てくる。

まるでプログラムのデバッグ作業のようだ。
いつになったら今年最後の加工作業になるんだよおおおお!!!
あー、とりあえず、今年はこんなところでいいかな???!!!

1月2日:
明けましておめでとう!
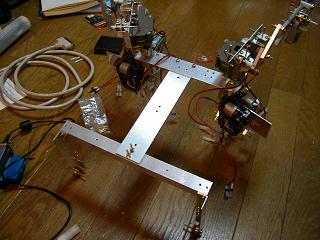
新潟の実家でうちの弟とカメラを交換したもので、性能が大幅にパワーダウンしているが許してくれ!

あと、一緒に写りこんでいる日付が変だが、気にしないでくれ。

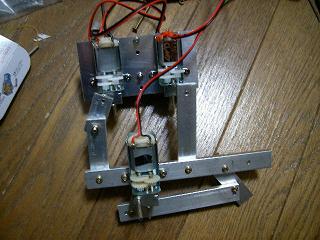
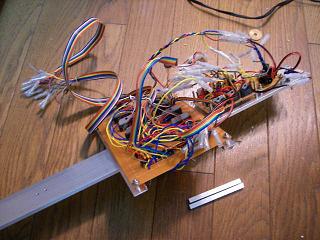
ひとまず本体を組み上げた。

それから、制御コンピュータを本体にくっつけやすいように改造だ!

今回はもう、取り付け部品を直接くっつけよう…。

ちなみにくっつけているのは、調子の悪い基板がくっついていた胴体だ。

よし、ひとまず完成だ…一休みしよう…。