
1月12日:
ようやく歩いたには歩いたが、GE-9のように足を決められた角度に曲げる、原点復帰と言う動作が思うようにできない。
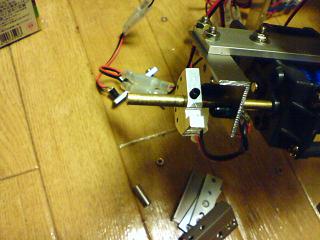
そういうわけで、エンコーダを改良してみた。
具体的には赤外線の通る穴を拡大したのだが…。
それから、真ちゅう製のシャフトを全てのシャフトに付ける事にした。
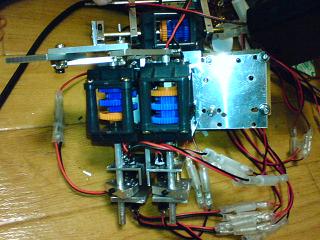
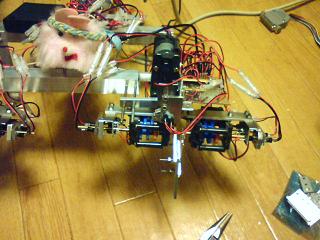
これが、アルミニウムパイプのシャフトがくっついている状態の足。
どうもパイプが潰れたり、割りピンの通っている穴が広がったりして、どうにも調子が悪かったのだ。
真ちゅう製に換装!
シャフトの色が黄金色になったぜ!

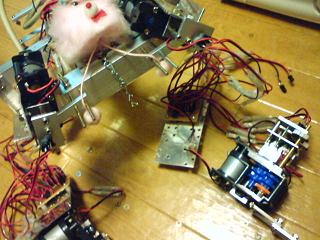
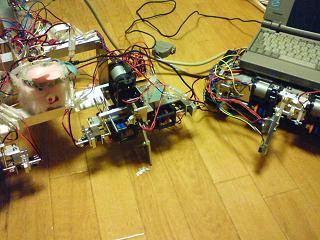
と、ゆうわけで、動作テスト。

相変わらずGE-9のパソコンをそのまま使い回ししている。
そろそろ専用のコンピュータでも欲しいところだ。
1月16日:
そんな中、気分で赤外線通信ユニットを作ってみた。
これ自体は失敗作だったが、うまく動作しない理由を探しているうちに、現在くっついている電装品の一部が何故動かないのか、その原因が分かった!
そしてこの成果はGE-10のおかげだと言う事にして公開試験場にのせたぞ。
1月18日:
と言うわけで早速改造開始!
これで背中の基盤にくっついているICのうち三分の二がまともに動き出すぞ!
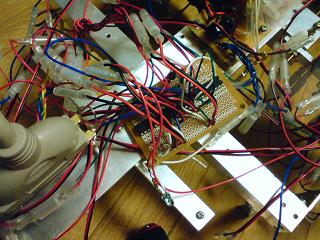
一度基盤を外して改造。

さらに、今までごまかしていた脚部制御ユニットの不具合もちゃんと直しておこう。

さぁいくぜ!

ウインドウズ起動だ!
もう面倒臭いからパソコンはGE-9に載せたまま使ってやる。
と言うか、この状態でも使えるのを忘れいたよ…。

レッツウォーク!!!
…。

1月19日:
とりあえず歩き出したんだよ!
歩き出したには違いないんだよ!
ほら、上の写真の約二分後にはちゃんとここまで前進している!
1月20日:
で、センサーが外れたところで、今日のところはそろそろ見切りをつけようと思った。
今回の成果を元に大改造を行ってやる!!!

…と、ここまでの経緯を次の公開試験場のネタにした。

1月24日:
んー、まぁ、チェーンでGE-9によって牽引して移動っていうのも、それはそれでGE-9が単純で高信頼のメカとして開発した目論見がうまく行っているという意味なのでそれはそれで良いのであるが、やっぱりそれで終わらすのもどうかと思うので続きを進むぞ。
今度は脚部のギヤボックスの配置を全面的に改めよう。

と、ここで腹ごしらえ。
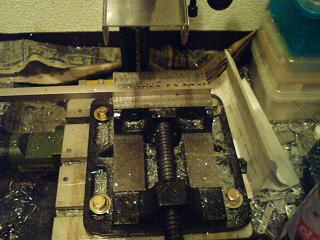
さ〜削るぞ〜

バンバン部品を作るぞ〜

そして部品を作った後毎度の如く再加工をしまくって、

あとは結局目論見どおりに行かなかったエンコーダーも別の改造を施して、

再組み立てだ!
…シャフトの位置の都合で足が閉じられない…。

1月25日:
結局脚部を繋ぐ部品まで新造する事に。
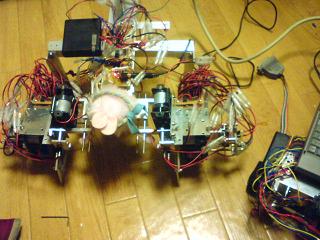
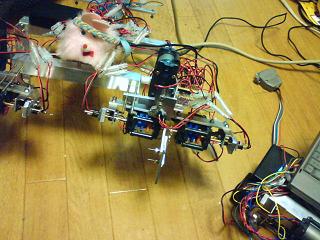
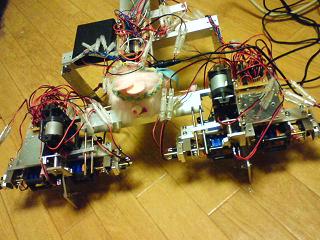
首が無いぜ!
まるでデュラハンだぜ!
でも首がない方がメカっぽく見えるな…。
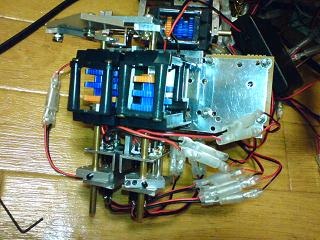
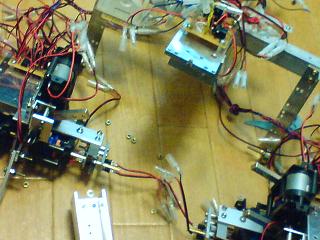
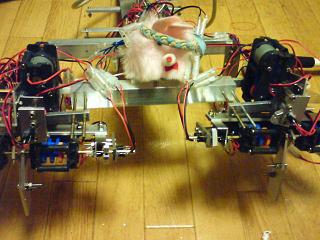
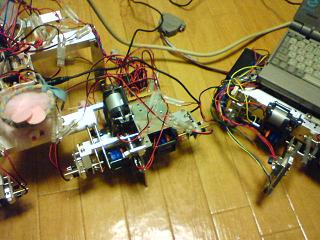
ちなみに現在の脚部の形状。
真ん中から伸びているのが、前後方向の可動部分。
凄い短足であるが、これも入手しやすいギヤボックスで可能な限り力を出すための策であって別にふざけているわけではない!
ふざけてないってば!

新しい腰部ジョイントができたぞ!
う〜ん、横幅が広がって可動範囲が広がったぞ〜
1月26日:
再び首を装着。
おっと、ミサンガを忘れていた。

そしてセンサーを取り付ける。

よーし!いくぞー!

GE-9も頑張るのである!
1月27日:
頑張る!

頑張る…。

1月30日:
あああもう思うようにいかねぇなあああ〜

改めて部品製作だ!!!
特にエンコーダを新造だ!
残りのセンサー部品を新造しなくて済んだのは奇跡と言えよう。
結局このエンコーダは交換する事になるわけだ…。
基盤の応答速度を上げるために、再び改造。
最終的に、ここにくっついているICは全て使用されることになった!
厳密には最後のひとつは半ば無理矢理の使用であるが。
そして性能が上がったかどうかについては別問題だが…。
1月31日:
よーし始めるぜー!!!
…。
一分後。
ちょっとだけ進んだが…。
なぁ〜んか思うように動かない。
足を反復運動させるだけのはずなのだが、どうもうまく行かない。
原因を調査した後、一度エンコーダを外す…。

エンコーダそのものも追加工して、一旦お出かけ。
2月1日:
帰って来て取り付け。

さぁ気を取り直して始めるぜ!
レッツウォーク!
これは人類にとっては小さな一歩でも、俺にとっては取っても大きな一歩になるぜ!!!

…。

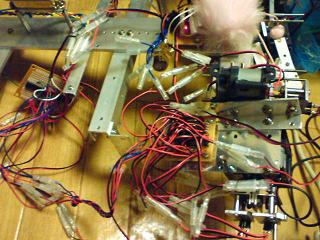
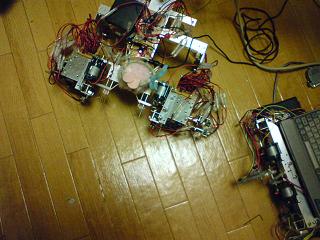
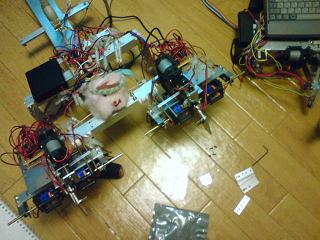
四分後。
よく、頑張った…。
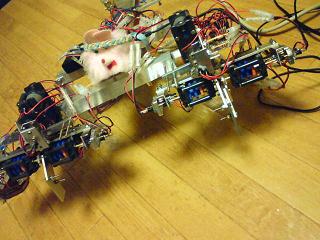
写真じゃよく分からないのだが、そして動きは回路の都合でトロいのだが、足が可動範囲の限界まで動いて行動不能にならずに長時間動かし続ける事ができるようになったのだ。
ここまで来るのにこんなに時間がかかるなんて…でも、やっとできた…。
2月5日:
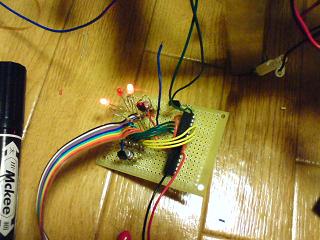
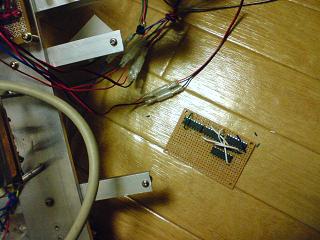
そして一段落をつけるために、回路を一部新作。

必死こいて回路を繋ぎ換え。
そして次の段階の動作テストで毎度の如く思ったとおりに動かない!
ここでテスターを使って問題の原因を探る。
テスターのおかげで原因が分かった。
パソコンと回路を繋いでいない!!!
あー、やっと動くようになった…。
やった…やったよ…二足歩行ロボが…いや、うちの子が歩き出したんだよ…。
補助輪つきだけど。
これをネタにして公開試験場に載せた動画でも、ちゃんと画面端から中央を通って反対側まで進んでいるのがわかる!
ようやく一段落が付いた、しばらくGE-9の改造に手を出そう…。