
3月23日:
よーし、本格的にパワーアップしてみるぞ〜!
今まで、一個千円程度のタミヤのギヤボックスを使っていたが、これを強力なギヤードモーターに変えるのだ。
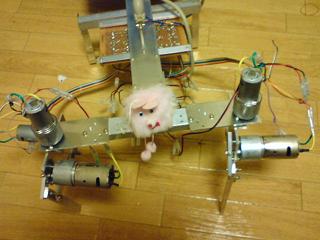
分解!

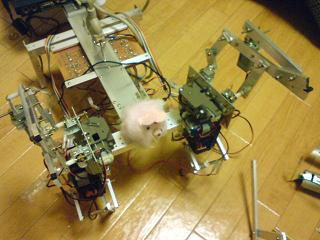
そして先回作ったやつを結合!
おお!腕が無くなった代わりに強そうになった!!!

3月24日:
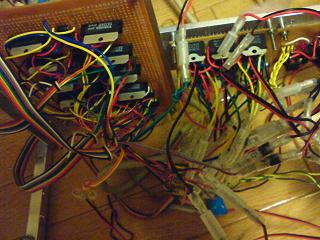
引き続き、配線作業。
写真のような、モーターにくっついている接続端子の在庫がほとんどないので、

こんな風に取り替える。

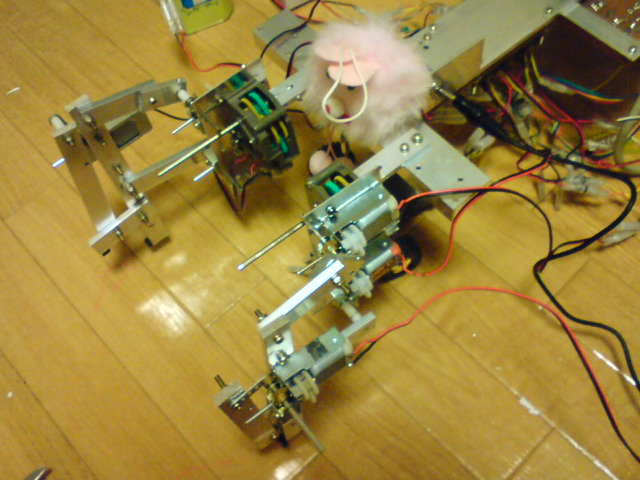
ついに!足が動くぞ!
早速起動だ!!!
…あれ?
動かない。
いや、足の部分を地面から持ち上げると動くには動く。
どういうわけか、以前より力が出なくなっている…。
3月25日:
ギヤードモーターの説明書を見ると、どうやら現在俺が作っている回路では電力が足りないのかもしれない。
…が、いまさらこれ以上大掛かりな改造をするよりも、センサーをつけたりする作業がしたい。
さてどうしようか。

3月26日:
というわけで、解決策を発案して実行。
この案だけは使いたくなかったが、仕方があるまい。
そしてこの足を改めて換装する。
そのうち回路の問題が解決できるめどが立ったら再び使ってみよう。

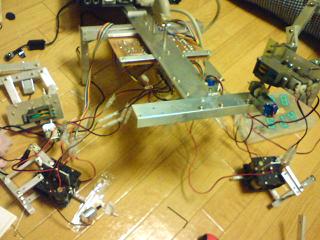
ばばーん!!
二足歩行ではなくてタイヤ付きだけどな…。

ちなみに写真の上に余計な箱が乗っかっているのはわざとではない。

思い切り重心を後ろに寄せた設計なので、タイヤだけだと構造が単純になりすぎて前側が持ち上がってしまうのだ。

ついでなので、腕もくっつける。
今度こそ、物をつかめそうな雰囲気…。
なかなか強そう。
3月27日:
昨日の動作状況を踏まえ、回路の確認をしてみる。
誤継無数誓願動、南無阿弥陀仏。
起動すると、今まで以上に、それこそキャタピラ時代のGE-7を思わせるくらいに元気に動くロボットができた!!!!!
まさしく究極超パワーアップ!!!!!!!!
シンプル・イズ・ザ・ベストと言うことか…。