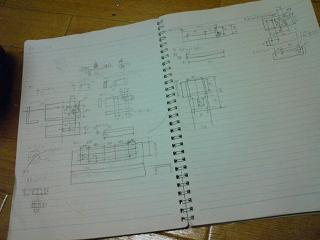
12月29日:
GE-9の改造も一段落して、正月休みなのでちょっとここでいつもと違う事をやってみようと思ったのさ。

最近、4㎜の棒を加工してタミヤのギヤボックスにつけられそうになってきたので、これを使ってみようと思うのだ。
今までのシャフトだと短すぎて、何かと不便だったんだよ…。

12月30日:
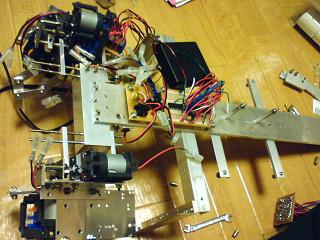
と言うわけで部品の生産を開始。

12月31日:
生産。

どんどん生産。
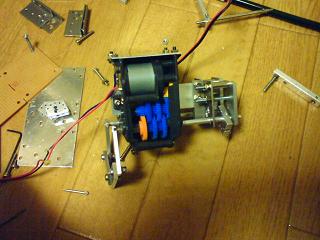
そして組みつけてみる。
いいかもしれない。

あと、ずっと眠っていたGE-7の部品も使ってしまおう。
ここで使わないともったいないしねぇ。

1月1日:
そしてここであけましておめでとう。
年が明けたよ。

GE-7のギヤボックスをどんどん持っていく。

それから、さらにじゃんじゃん部品も生産。

昨日に作った部品の不具合を見て、またくっつけていく。

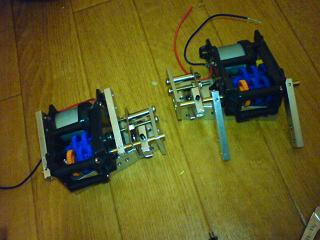
今回は脚部を短くしようと思う。
トルクの関係で、短足の方が力が出るのだ。
でも部品の干渉でうまく組めない状況が多数。

1月2日:
その情報を元にさらに生産。
さらに、アルミのシャフトでは心許ない部分のために、思い切って真鍮のシャフトも作ってみる。
真鍮は切り粉の始末が大変なのだが、あまり削る部分がなかったので思ったほどには面倒にならずに済んだ♪
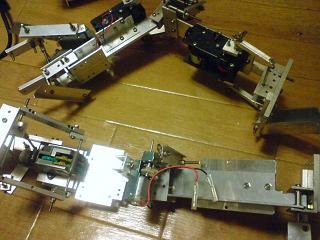
足の付け根の部分のシャフトは真鍮で、ロボットの腰の部分に15度傾けてくっつける予定。

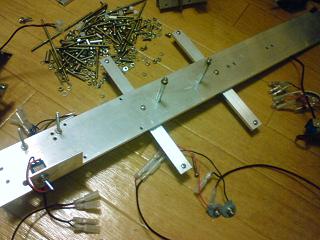
これを組むのだ。

まずは足を完成させ、

これを腰の部分にくっつける。
1月3日:
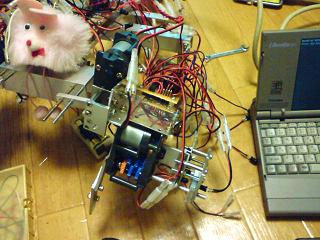
動作テストには、Libletto20という、今までとはちょっと違うパソコンを引っ張り出してきたが思うように動くまで手間取っていたりした…。
結局、回路の動作確認の後は、GE-9の完成パソコンを引っ張り出してくることになるのであった。
それはそうと、GE-7の脚部を全解体しよう。
どんどん使わないとね。

と言うことでバラバラに。
大量の資源ができたぞ!!!
さらにこれを取り出す…そう、GE-11。

そしてGE-11を分離!
でも使うのはこっちの部分じゃない!!!!

粉の後ろの部分を使うのだ。
この部分は完全にGE-10の部分だから、GE-10が復活した事にして話を進めるのだ。
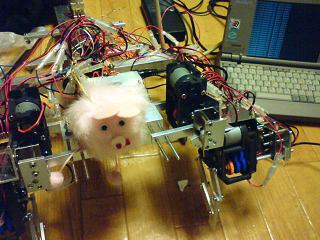
頭部もちゃんと復活だぜ!
でもそのすぐ後で、一度バラす。
何で補助輪つき二足歩行ロボなどを考えようとしたのか、それを思い出したのだ。
だからそれ相応の加工をする。
別にふざけているだけじゃないんだぞ。

1月4日:
そしてここから電装品の製作開始。

間に合わせで、転がっていた基盤とそのICを再利用しよう。
これが間違いだったようだが…。
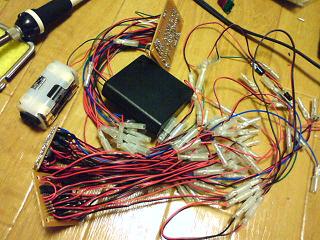
接続端子をくっつける。
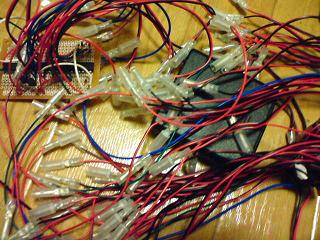
1月5日:
さらに接続端子をくっつけまくる。
そうしたら…、
あああ~年末に大量に買ったつもりがもう底を尽きかけている…。
結局、今の接続端子と時間の都合で、腰の付け根の関節は動かせないが、できるなら休みのうちにちょっと公開試験場に載せたいと思った。

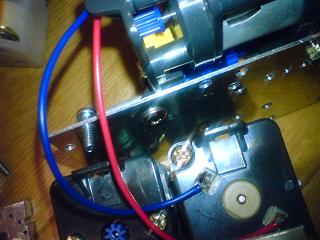
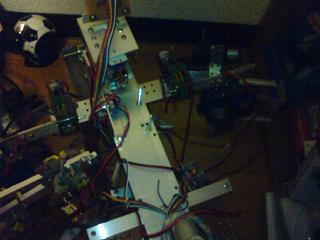
バシバシ繋いでいく。

接続の不具合もいくつかあったが何とかして、繋ぐ。
今回は、足を駆動する電装品を足に直付けしてみた。
今までは一つの基盤に全部をくっつけていたからね…どうなるやら。

そして一部の部品は瞬間接着剤を使ってくっつけるのだが、あんまり瞬間じゃないぞコレ。

頑張ってくっつけたが、うまく動かない…。

接続が間違っている事に気づき繋ぎなおしたり線を追加したりするが動かない…。

テスターを繋いだら、どうやら転がっていたものを再利用した基盤のICがひとつぶっ壊れていたらしい!
それとも、俺の回路設計が間違っているのか?
結局、中央にくっついているICの3分の2がまともに動いていない有様。

でも頑張るもんね。
せめて歩かせる目標くらいは達成するもんね。

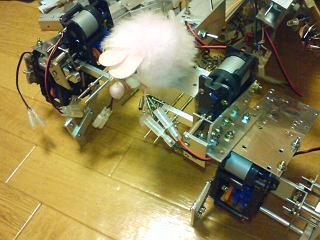
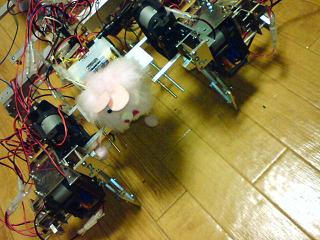
というわけで公開試験場に載せた内容がこの辺りからなのだ。
足が曲がっちゃいけないところまで曲がっちゃったり、アルミシャフトがみるみる磨耗したりで大変。
左の写真も、ペンチで無理やり足の先をやっと伸ばしたのだ。

足が潰れないように、後ろにバラストを間に合わせで付けてみるが、うまく行かない。
1月6日:
結局仕事初めには間に合わず、仕事帰りで改良続行。

具体的にはとりあえず、足を改めて生産して取り替えた。

そうしてようやく歩いたわけだ…。
この調子で、少しづつでも改良していくぜ…。