なお、この後、足に使ったモーター数万円分のクレジットの支払いに四苦八苦する俺でした…。
でもあきらめないもんね、よし!今こそ三大合体の時だ!!!
3月29日:
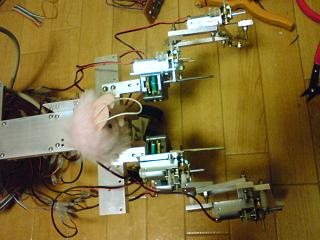
歩けない補助輪付き二足歩行ロボットのGE-10と、

車輪式のくせにまともに走れなかったGE-9と、

回路すら取り付けられずダンボールの中でバラバラになっていたGE-7と、

ついでにキャタピラ時代のGE-7の部品も失敬して、
数十分後…。
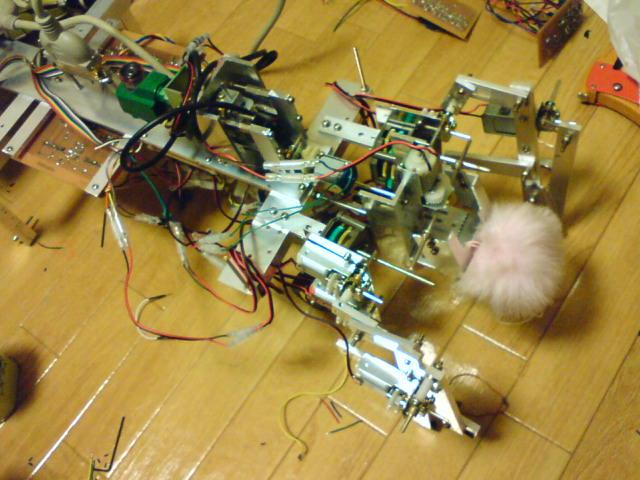
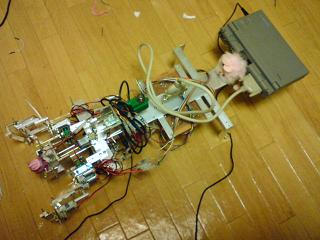
ばばーん!!
結局タイヤ式だけどその辺はご愛嬌!
そのうち考えるよ、そのうちね。
3月30日
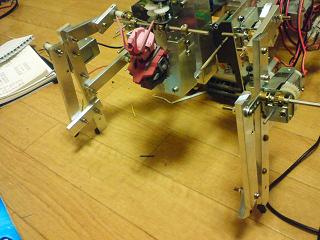
ちゃんと、ガンダム顔にした。
このようにすると「機動性」と言う神秘のパワーが出て、ものすごいことが起こるのだそうだ…。
…ほんとかな?

それから、もうひとつ…。
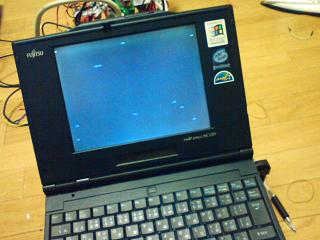
このパソコンがねぇ、どうにも調子が悪い…。
DOSで動いているのに中身のデータがイカれてくるのだ。
やはりジャンク故、これをハードオフに売り払った人は、これが理由で売り払ったのかもしれない。

仕方が無いので、まだ使えそうな部品を取り払い、このパソコンは破棄することにする。

そしてGE-9のパソコンに部品を付けよう…と思ったが、ダメみたい。
この東芝リブレット60というやつは、拡張性は無いのだな…。

そして今までのパソコンから、接着剤でくっつけた部品を引っぺがす…。
おりゃああああああああああああああああああああああああああああああ!!!!!!!!!!!!!!!!!!!!!

引っぺがすのにだいぶ時間がかかったが、何とか外れた。

そして、これをGE-9のパソコンにくっつける…。

ぺたっ。
また引っぺがそうとすると十中八九破壊することになるが、その辺を踏まえて、予備の部品がこの部屋のどこかに埋もれている部分にだけ接着剤がつくようにする。
できた!!!
ガンダム顔のロボットが!!!

3月29日
時を前後して、センサー用の回路の完成が近づいていた。

3月31日
これにセンサー部品をくっつけて、パソコンから読み取れるようにするのだ。
プリンタポートは基本的に送信することを考えて作っているのか、受信機能はオマケだったり(通常はBIOSで送信専用になっているようだ)、そもそも受信機能がついていなかったりするのだが、一本だけ受信できる端子が標準でくっついているので、これを使うのだ。

と言うことで取り付け。
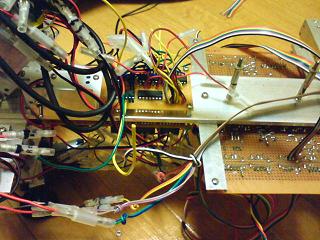
こんな感じになった。

…で、動かないんだ…。
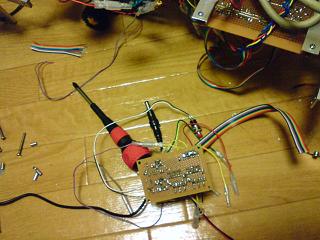
回路を必死こいて見たら接続ミス発見。
せっかく必死こいてメカに搭載したのに…。

今度こそ、大丈夫なはず…。

で、無事に動いたわけだ。
実際にまともなセンサーを付けてから、動きの状況報告をする予定だよ。

別件で忙しくなったので、しばらくお休み。
時々こうやってソフトのアップデートを行って、四月を迎えることに…。