
4月20日:
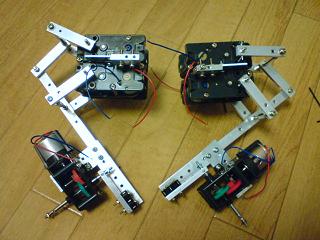
以前にGE-10ように作ったパーツ、実際に使用した二個のほかに、予備でもう二個作ったのがあった。
これを使って腕を改良しよう。

それから、センサーを取り付けるということで、まずは部屋にある押しボタンスイッチやマイクロスイッチを探す。
さらに、今回始めて導入するウォームギヤボックスHEの登場。
クラッチギヤはついていないが、ギヤボックスの中では感動するほど組み立てやすかった。

そして部品をそろえたところで、もう工作機械を使わないほうがいい時間になってしまったので今日は明日に備えた準備をして寝る。
おやすみ。

4月21日:
朝、眠気と格闘しながら起きて加工。
さらに組み立て。
物を掴む部分にセンサーをつけた。
センサーというとかっこいいが、要は押すとパッチンと鳴るスイッチの事だ。
そして用事で出かけて帰ってきたあと、この今までの腕を交換する。
この腕、動かそうとすると回路のほうが誤動作する癖があって、今回の部品と変えてみることにしたのだ。

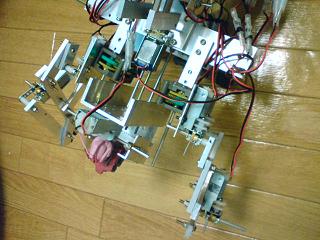
ばばーん。
以前よりも強そうになったな、はっはっは。
半田ごてを使って、モーターとセンサーの配線をする。


そうして出来上がって、ソフトウェアの更新をして、動作テストをした。
スイッチぽちっ
ロボ「ういいん(20センチくらい後ろに下がる音)」
やったあああああああああ!!!!
もう一回…。
スイッチぽちっ
ロボ「ういいん(20センチくらい後ろに下がる音)」
やったあああああああああ!!!!
もう一回…。
スイッチぽちっ
ロボ「ういいん(20センチくらい後ろに下がる音)」
やったあああああああああ!!!!
もう一回…。
スイッチぽちっ
ロボ「ういいん(20センチくらい後ろに下がる音)」
やったあああああああああ!!!!
もう一回…。
スイッチぽちっ
ロボ「ういいん(20センチくらい後ろに下がる音)」
やったあああああああああ!!!!
…と、こんな感じで、その様子をアップしたのが今回の動画↓
http://ameblo.jp/drnabe/entry-10090216113.html