
9月6日
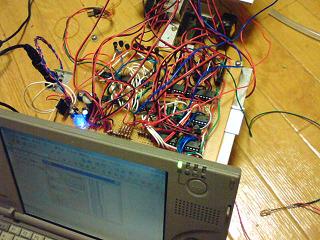
タイトルの通り、回路の改良の開始。
具体的には、センサーの追加。
9月7日
それにしても、基盤を外すのも一苦労だ、これも新しい方法を考えたほうがいいのかもしれない。
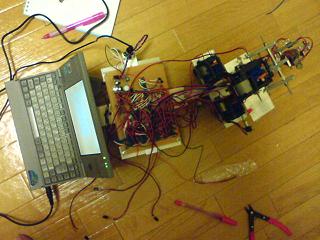
一通り改良したあと、メカも一部改良する。
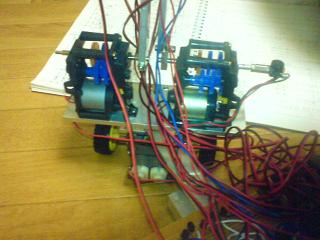
具体的にはアームのギヤボックスをくっつける場所を新作した。

今度は角度センサもくっついている!

その頃、新しい部品が到着した。

9月10日
そしてその頃、赤外線LEDが壊れるトラブルがここまでに二回もある。
しかも原因不明。
抵抗によって流れる電流は十分に低いし、電力不足であるわけでもないし…?
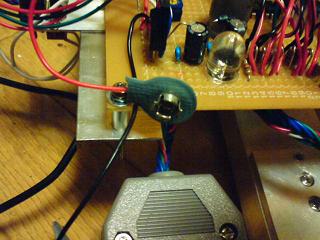
そう思いながらテストしていたら、パチッと言う音がした。
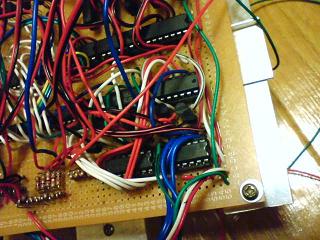
まるで焚き火の時に鳴る音だな〜なんて思っていたら煙を噴き出した。
その決定的瞬間は残念ながら捉える事ができなかったが、このトランジスタがくっついている部分から茶色い煙が出た。
予想通り、センサーが一部機能しない。
だが他の部分には影響は無い模様。
9月11日
色々と原因を調べていたら、ACアダプタを繋ぐと、9ボルトの電池を繋げるようにしていたスナップから電流が漏れている事が判明。
しかもセンサーとつなぐケーブルがたまたま金属がむき出しの部分があった。
つまり、
スナップがロボット本体に接触→センサー用ケーブルの金属のむき出しの部分が本体に接触→ACアダプタからのDC12V600mAの大電流がトランジスタのベース−エミッタ間(定格5V50mA)に流れる→パチパチ言って煙モクモク
と言う原因になったのだ。

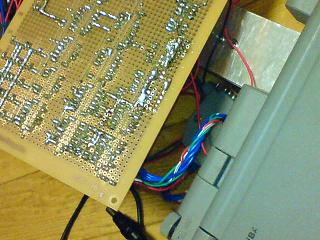
そして機能しないセンサーにくっついているトランジスタをちょん切ったら、予想通りプラスチックの外装が割れている…。
赤外LEDの故障もここから来ているのかもしれない…。
うまい具合に部品交換もして、製作を続ける…失敗は成功の元。
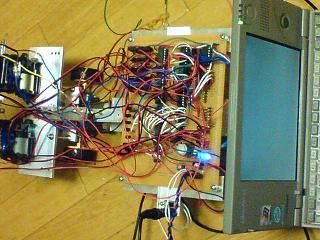
他にも壊れたセンサーの部品交換をしたりして、くっつけられるセンサーを全部くっつけて動作確認して、一旦ここで一休み。