うちのロボットは元々はホビーロボットではなく、職場にある自動機械や産業ロボットを参考に作ってきた。
そうして、そういう機械の場合、ホビーロボットとは決定的な違いがあるようだ。
産業ロボットは、ぶつからなければどうという事は無い、という考えで作られているようだ。
具体的には、例えばロボザックは腕が何かに引っかかって関節に過負荷がかかったりすると、再起動されて元の気をつけの状態に戻る。
しかし産業ロボットは通常、ロボット専用の「仕事場」を与えられて、無理の無い負荷で同じ作業を延々繰り返せばいいので、万が一何かに引っかかったら、エラー音と赤いランプを表示して停止して、復旧できる人がやってくるまでずっと待機状態になる。
どういう事かというと、ホビーロボットに求められているのは、産業ロボットよりも様々な地形に対処する能力がいるという事だ。
うちのロボットもホビーロボットと同じ。
というか、俺の最終目標はホビーロボット以上にいろいろな事ができるようになるという遠大な目標がある。
…と、まぁ、こんな風に、段々分かってきた事を延々話してきたわけだが、要は、ぶつかった事が検出できる装置が欲しいって事さ。
事実上のホビーロボットを作っている俺なのに、産業ロボットの機能と同じ調子でロボットを作っていたから、ぶつからないようにいつも監視している事にして、角度センサの事を後回しにしてしまったのだ。
ある日一個四千円もするモーターの歯車を二、三個吹っ飛ばして、ぶつからなければどうという事は無いとも言っていられなくなったのもずっと気にしていたので、回路のほうがだいぶうまく行くようになったので、ここいらで角度センサでも作ろうと思う。
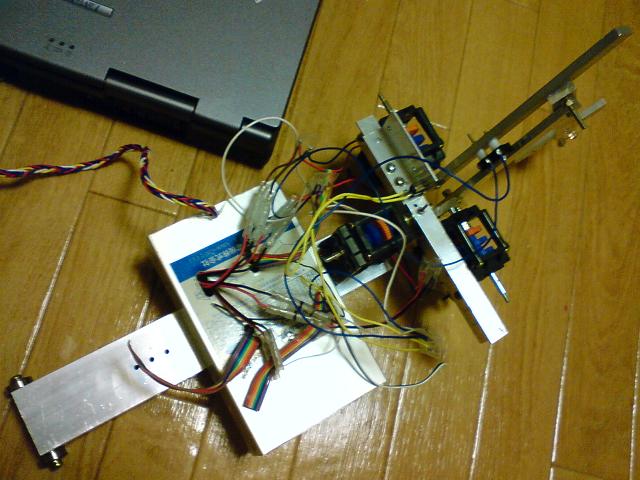
…ただ、そのために作った試験機が、とても産業ロボットみたいな姿…。
申し訳程度の移動能力は考えてみたが、本当に移動できるかどうか…?
ノウハウを溜めたら、他のロボットの改造とか、新型機の開発をしょうと思う。