ゴールデンウィークのGE-11の開発の試行錯誤で基盤をはじめ多くの部品を無駄遣いして、しかもここしばらくより続く金欠で部品が枯渇し始めた…。

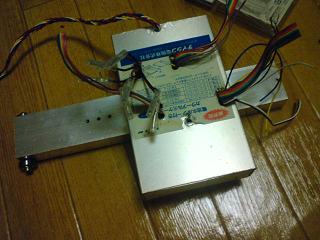
そうして、たまたま数年前に買ってそのまま転がっていた電子工作用ケースと、その中の基盤が相変わらず転がっていたので、いい加減使ってみる事にした。
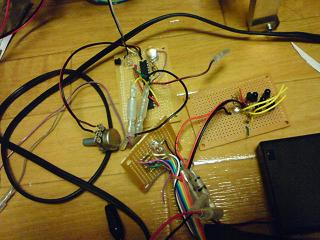
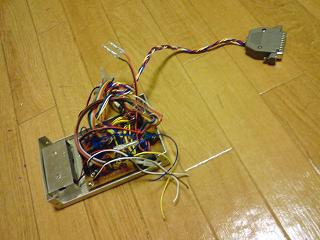
もう接続端子も底を尽きかけているので、みの虫クリップが活躍。
パソコンとの接続もみの虫クリップ。
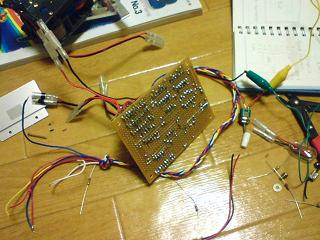
ちょっとづつ形が整っていく。
今回は部品不足の件も考えて拡張性は考えず、モーター四個とセンサー16個がくっつけられる箱にしようと思う。
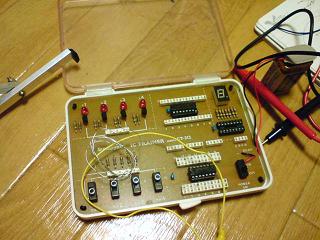
そんな中、ICのテスト用キットが出土したのだ!!!
今後はこれも使って部品のテストをしよう。
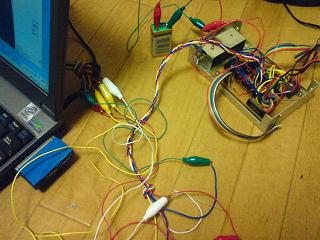
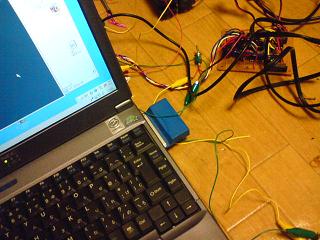
パソコンに繋いで動作確認をして、
不具合をテスターで確認して、あるいは部品の性質を先のICのテストキットで確認して、必要に応じて状況を手元にある本で確認したりして、
またパソコンにくっつけて動作確認。
ここにきてようやく、デジタルICの「オープン・コレクタ」の意味をはじめて理解したよ。

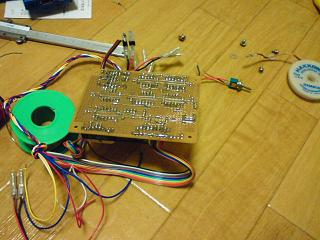
大体の分が揃ったら、絶縁コート剤を塗る。
喚起に気をつけよう。

仮組してみる。
うん、うまくくっついた。
この後、箱も加工するのだ。
ちなみに現在、GE-9が部品取りになっている。
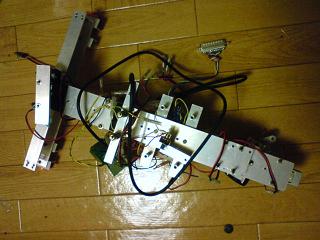
今回持っていった部品はパラレルポートのカバー。
左の写真の右上に伸びているアレね。
カバーが付いていないとパソコンから抜くのが大変なんだ。

次の日の朝になって、ようやく本体の本格的な製作を開始。
どの材料を使おうかな…この材料も無限じゃないしねぇ…。

一応、部品の補充もぼちぼち行っている。

しばらく材料を選んで、加工をする。

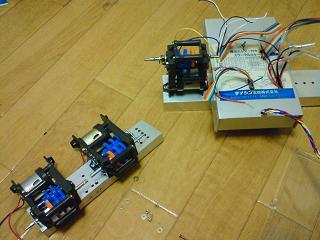
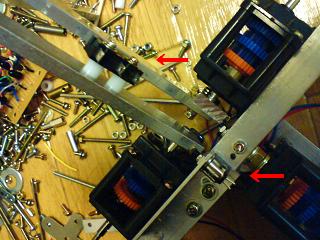
今回はさらに、普段はめったに手を加えないタミヤのギヤボックスの部品に手を加えた。
具体的には、出力軸の片方を切り落とした。
鉄は硬くて、うちで切断機が始めて火花を飛ばしたよ。
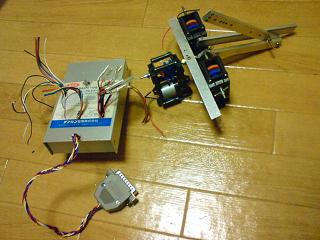
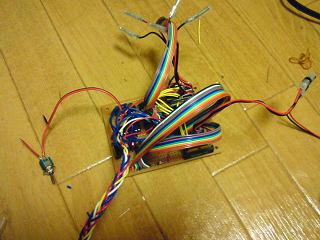
腕部をひとまず組んだ。

さらに、本体を加工して、

後ろに申し訳程度の移動用の車輪をつけて、
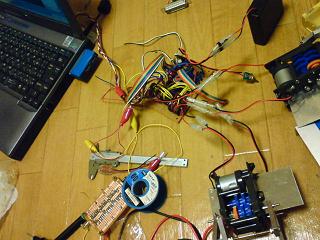
制御箱をくっつけて、
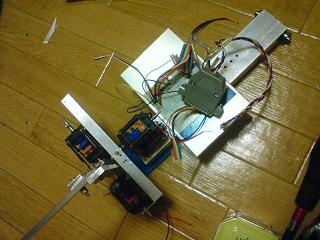
完成!
…と、見せかけて、今度はこれにセンサーを付けるのだ。

本体のアームと、その他もろもろ、スイッチをつけるのだ。
スイッチを取り付けて、改めて組み立て。
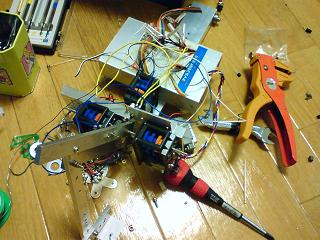
ひとまずこんなところかな。
これを元にソフトウェアを開発して、ノウハウを溜めよう。
そうそう、余談だけれど、そういえばようやくWindowsXPでロボットが動かせるようになったんだよ。
これで開発が楽になる!!