
7月19日
懲りずに部品発注〜♪
そしてせっかく何時間もかけて作った部品だが、後で改造候補にするとして、これは取り外してしまう。
7月20日
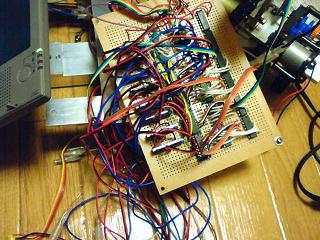
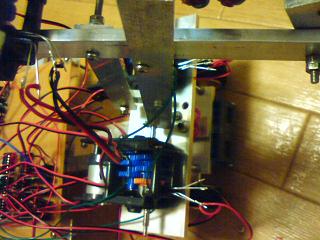
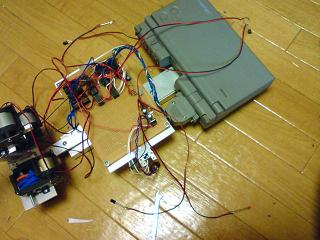
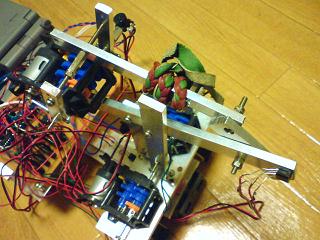
そして新型基盤を製作!
トランジスタ等も、さりげなくくっついている。
7月21日
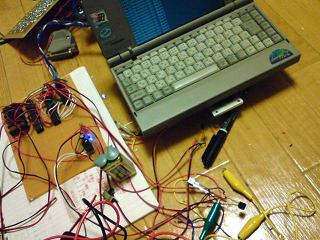
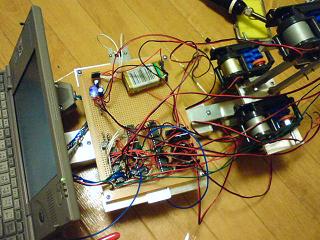
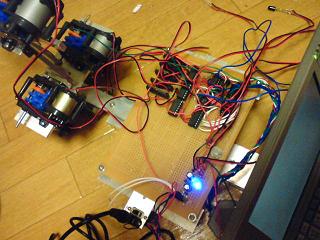
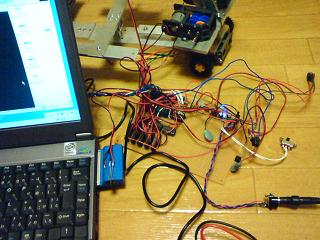
基盤を外して半田付けしたり、
取り付けてテストしてみたり、

センサーをくっつけてみて動作テストしてみたり、
両面テープでセンサーをくっけてテストしてみるけれどうごかねえんだよ。
でも、今度のは「全く反応していない」のではなく、「反応しすぎちゃって困るの」と言う状態なので、以前よりは前進したと言えよう!
トランジスタのボリュームはでかくしすぎたが涙のリクエストは成功しそう!

そういうわけでトランジスタのボリュームを可変させられるようにしてみる。
…よしよしよし!

7月22日
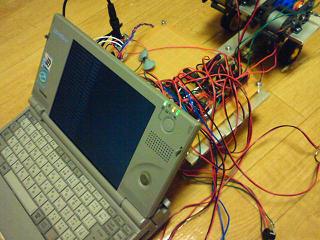
よしよしよし、肝心のボリュームが役に立っていないが一応それなりに動いている!
7月23日
と思ったら動作がおかしくなった!!!???
何故だ!?
どうして元に戻らないんだ!?
どこかの部品が壊れたか!?
…と、思っていたら、部屋に日光が差さなくなると元に戻った。
赤外線センサーだから、日光に混ざった大量の赤外線が入ってくると正常に信号が読み取れなくなるんだ。
コードレス赤外線マウスの弱点と同じ…。
当分は日光の苦手な引きこもりロボットとして暮らすようだな、こりゃ。

7月24日
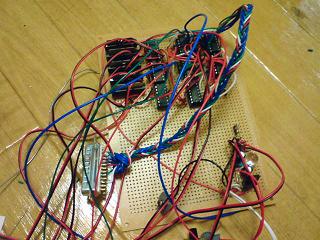
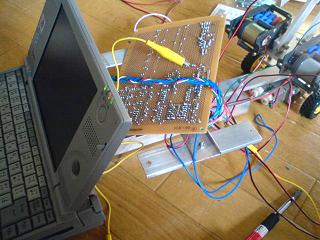
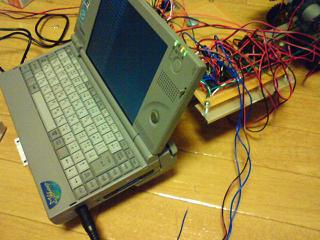
さて、その赤外線センサーがこれなのだが。
他にも可視光線の出る発光ダイオードや普通のフォトトランジスタをつけて、
どんな部品をつければいいかテストしている。
7月25日
「今度こそ完成!」等と思いつつ、基盤をロボットにネジ止めをして、「やっぱり改良すべきだ!」と考えて、せっかく締めたネジを外すのが続いている…。

そうして、今度は、以前にうまく使いこなせなかった転倒スイッチを使ってみる。
これならば日光に関係なく動くぞ!
「転んでない」「転んだ」の二つの状態しか読み取れないが、角度センサには違いねぇ!
7月27日
うん、悪くないような気がする。
ちゃんと動いていると思う…。
7月28日
…。

7月29日
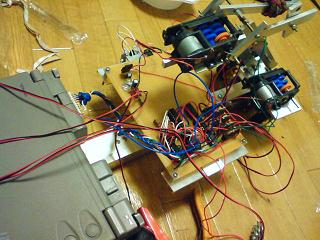
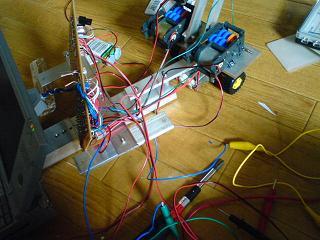
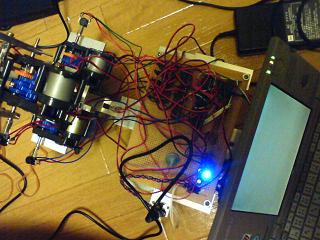
とりあえず、ぼーっとしていても仕方が無いから、取り付けてみる。
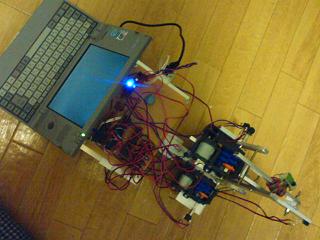
ああ…ついにセンサーがくっついたね…。
一応、動いているみたい。
8月2日
そうしてもう一つ、マジックハンドの先端部分、ここが図面通りに製作できなかったので、追加で改造する。
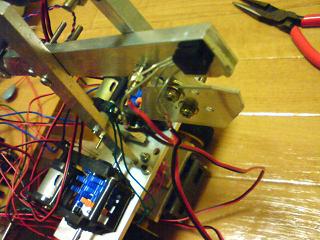
マジックハンドの爪が、以前よりもうまく開閉ができるようになった。
8月5日
今度はソフトウェアの部分の開発開始。

8月9日
本当はもっと角度センサをまともに動かしたいのだが、とりあえずソフトウェア。

そして角度センサを作り始め…早速行き詰まっている。