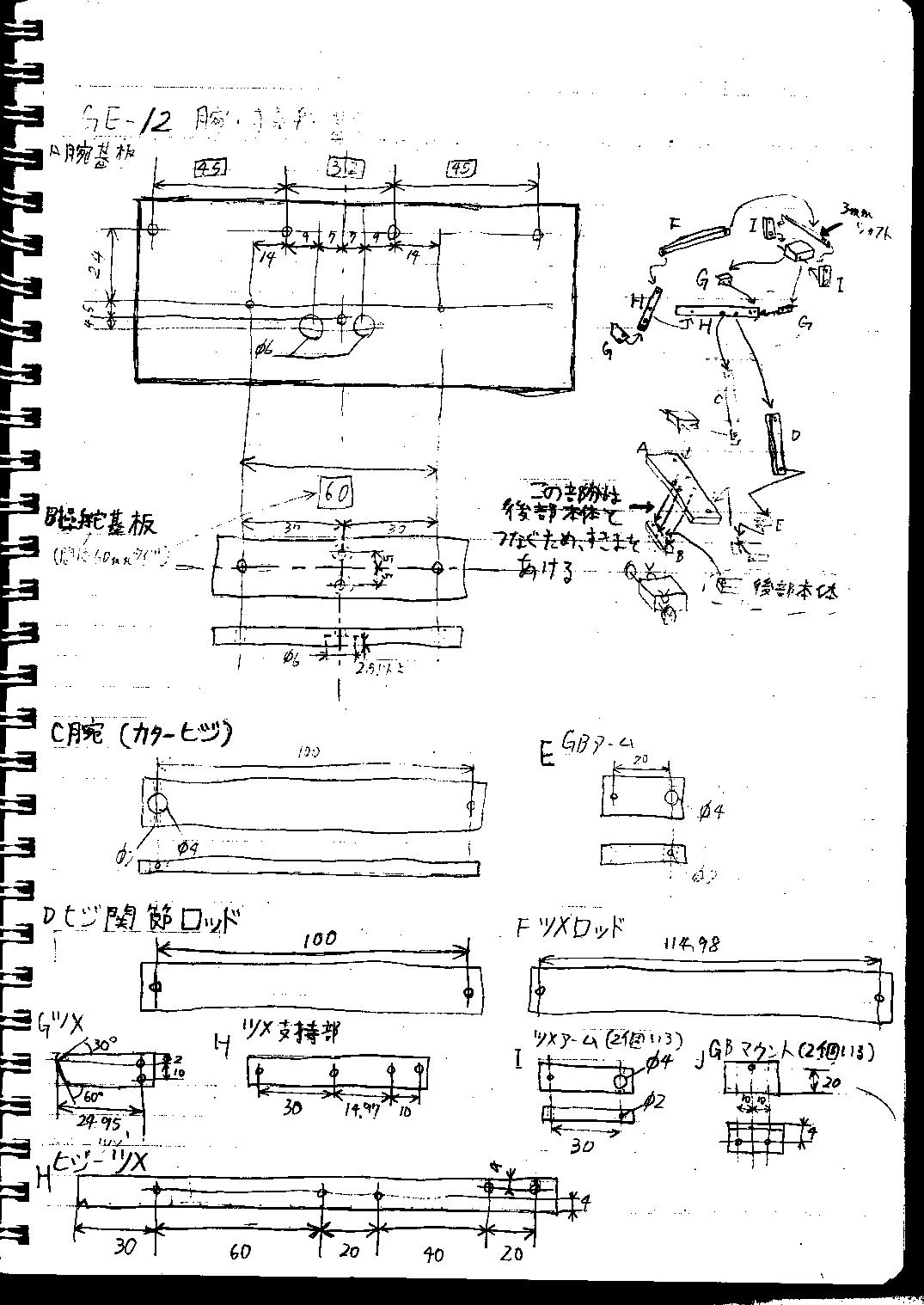
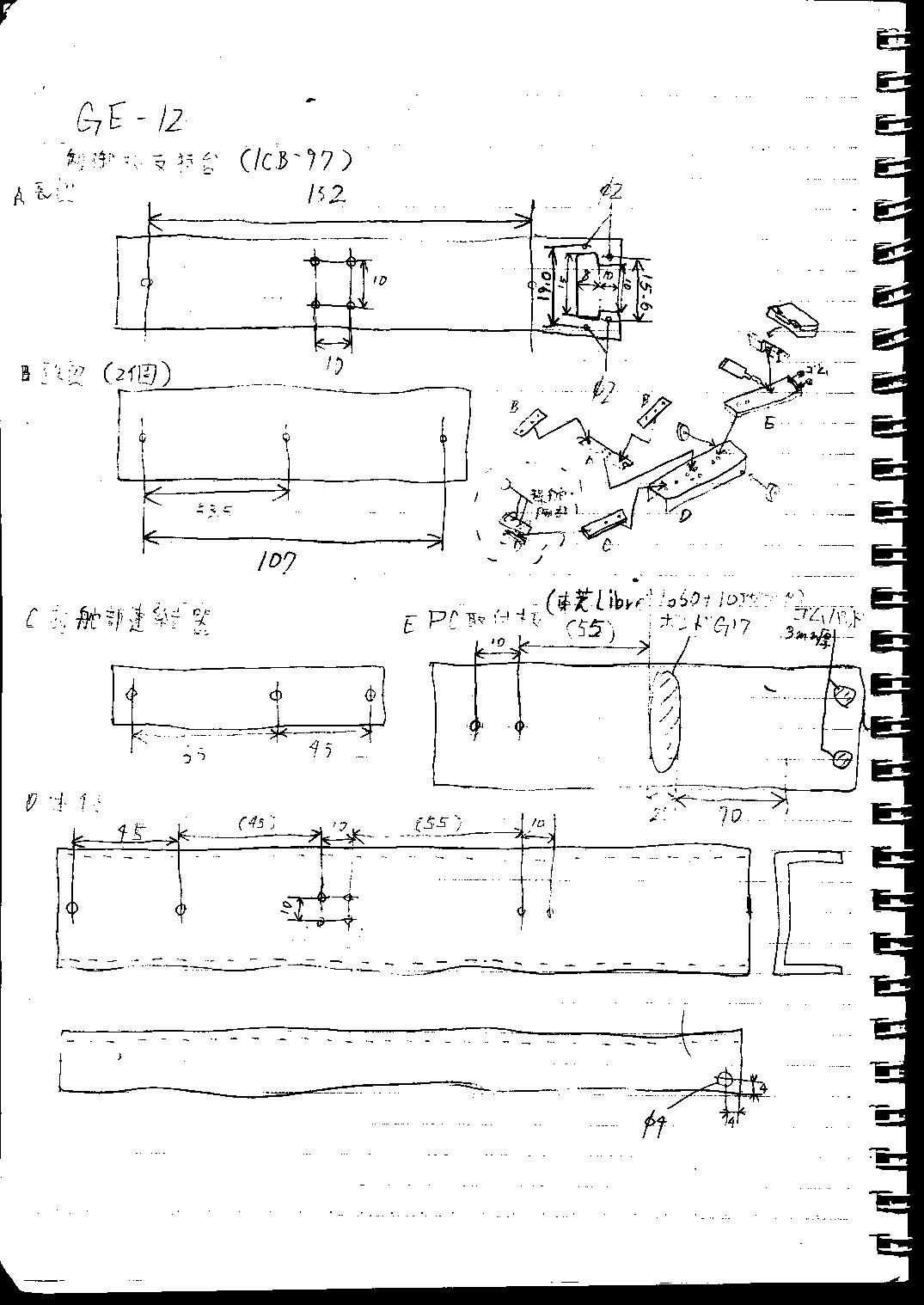
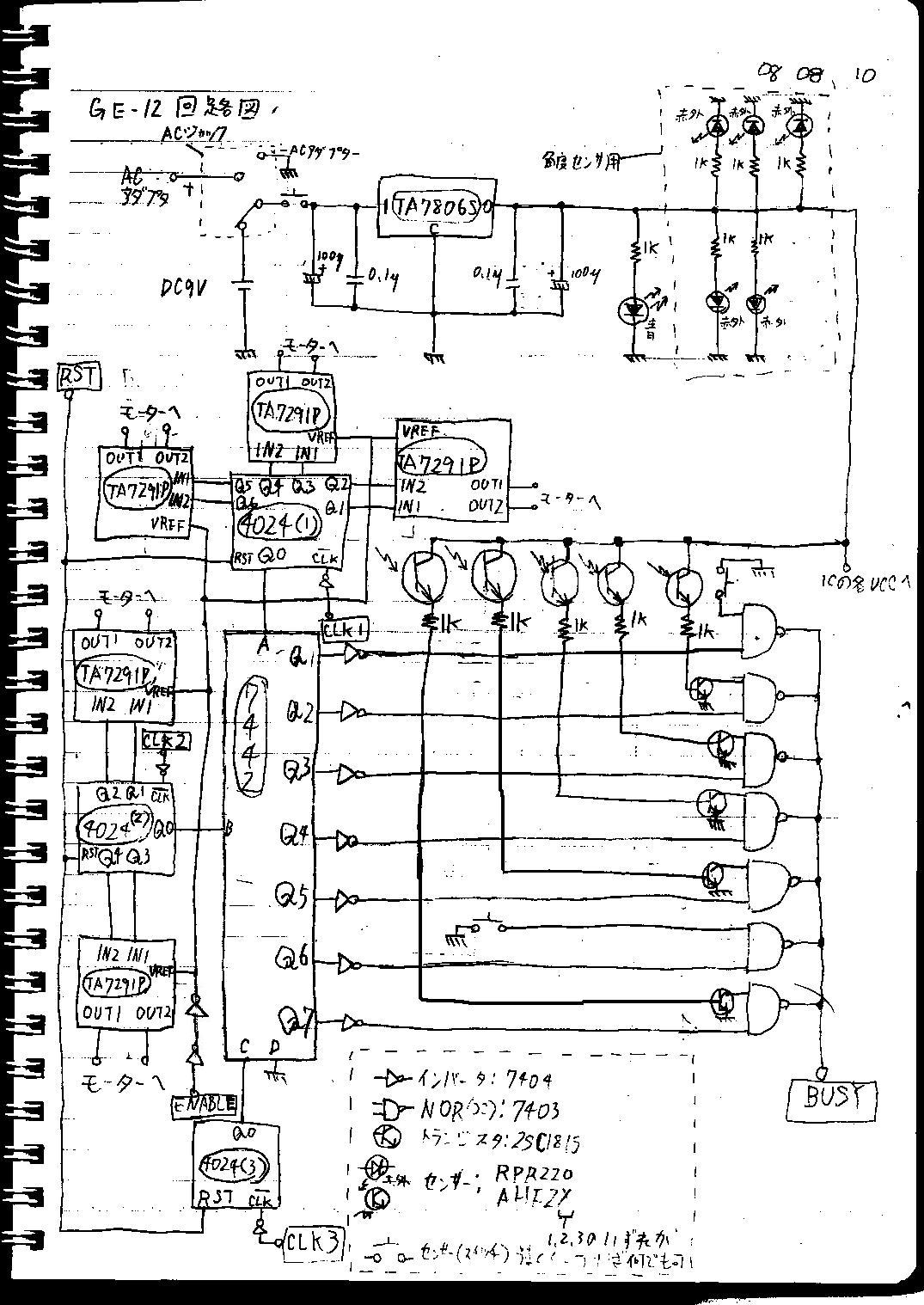
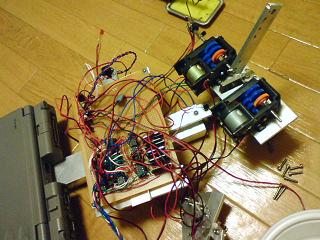
さてここで、今までのGE−12の機械の図面と電気図面をここに記録しておこう。
スキャナで読み取る時に薄くなってしまったり、実は回路が間違っていて慌てて修正した部分もある(9月24日にも、真ん中の図の本体左側の「47」と書いてあった穴の間隔を「45」に修正している)が、何とかこれでコピーが作れると思う…思うってば…。
…で、このページを作る時に確認したのだが、モーターの電源を書き込むのを忘れていた。
これはACアダプターからスイッチに入った直後の部分から5Ωの抵抗を繋いだ上で(繋がないとモーターを動かした時に電力低下か何かでICが誤作動するらしい)、モータードライブICのTA7291PのVS(モーターに流す電力を供給する部分)に枝分かれさせて繋ぐのだ。
8月10日
そして、せっかく上に設計図を載せて、転倒スイッチもくっつけたわけなのだが、さっさと新しい部品をくっつける事にした。

と言うわけで加工。
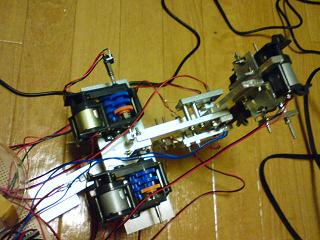
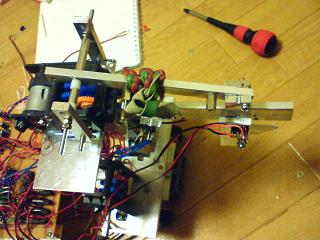
角度センサ用の穴を開ける。
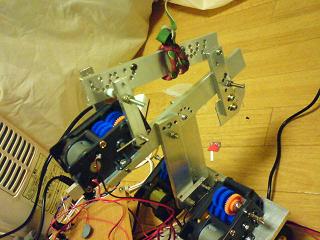
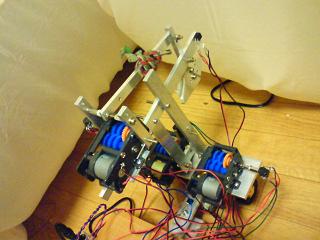
それでもって再組み立て。
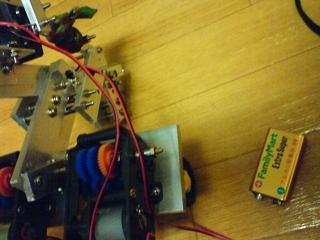
ちなみに上のミサンガが引っかかっている部品がやたらと穴が開いているのは失敗作をそのまま流用しているからだ!
なんてエコロジー!
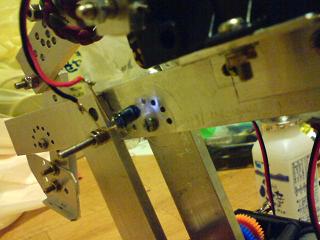
そしてこの、関節の周囲に開けた穴から赤外線を照射して(携帯のカメラだと赤外線が見えることが判明!)、反対側にくっついているフォトトランジスタを使って動きの情報を受け止めるのだ。
ちなみに赤外線でなくてもいいのだが、たまたま安く手に入るのが赤外線用のやつばかりだったからこれを使っている。

8月11日
次の日から大学のスクーリングなのだが、その前にやれるだけやってしまうのだ。
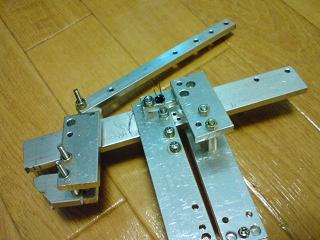
失敗作の部品とか、以前に別の部分で使っていた部品を再利用するからどんどん無意味な穴が増える…。
戦時中の日本の兵器工場が、部品の互換性が結構いい加減だったと聞く理由って、やっぱりこういう融通を利かせる利点があったせいなんじゃないかと思うんだよね。
実際どうだか知らないけれど。
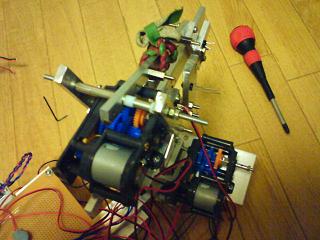
そんな事より、重大な問題が発生。
頭部が重すぎ!
重みをギヤボックスが支えられない!!!
具体的には、クラッチギヤという、過負荷が掛かると空回りするギヤが作動しまくり。
こうなったらギヤ破損覚悟でリミッター解除だ!!!
本当にギヤが破損したら設計を見直さなきゃいけないが、もしかしたら「安全のために力を押さえてあります」と言うだけなのかもしれないし、クラッチギヤを移動してみよう。
やった〜、ひとまずまともに動いたぞ〜♪

この後、配線作業を続ける。
そうして動かしてみる…。
ソフトウェアの製作は後にして、とりあえず正常に反応しているのを確認…やったぁ。
8月16日
スクーリング合間の作業。
ソフトウェアの開発をやってみる。
やっぱり30度以上動かないと検知できない角度センサーでは使いづらいな…。
あと、ここにきてバックラッシ(ギヤボックスのガタ)がセンサーの検知に想像以上に悪影響が出ることが判明。
8月23日
夏休みが終わって、最初のお休み。
角度センサがもっと細かく角度を読めるように改造する。
瞬間接着剤を使うと解体が大変だなぁ…。
8月24日
フォトトランジスタや赤外線発光ダイオードを増やしたり、ちょっと電気系統も改造。
まだくっつける前に動作テスト。

部品の補充が来た!
加工も続ける!
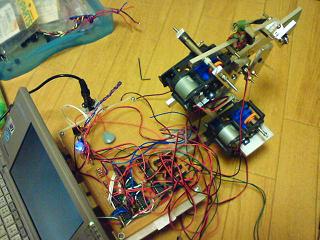
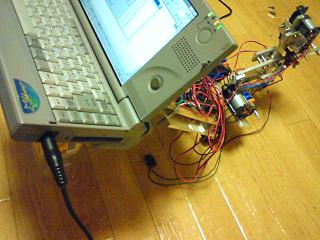
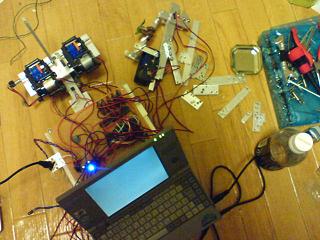
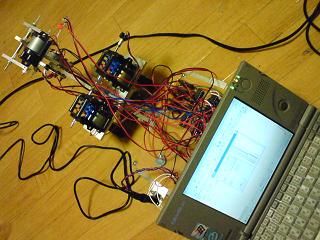
うーん、何だか、金欠の時にあり合せの物体で作ったこいつが何かと活躍するなぁ。
WindowsXPで初めて制御に成功した時に使ったのもこれだし。
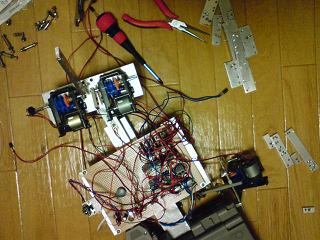
配線作業は現在も大変だが、接続端子を減らしたら、以前よりかなりすっきりしたような気がする。
改造した分の目論見は成功したが、やはりバックラッシを何とかしないといけないようだ。
8月31日
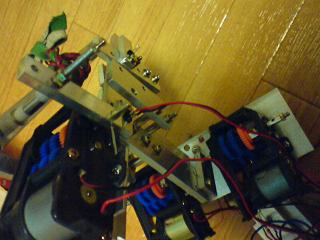
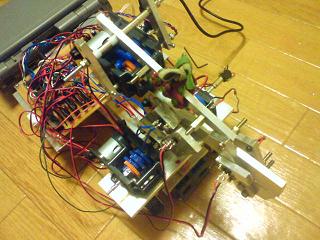
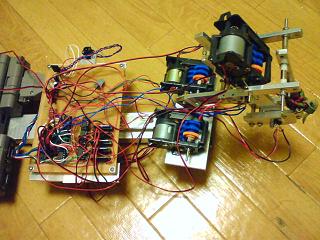
と言うわけで一週間後、改造してみた。
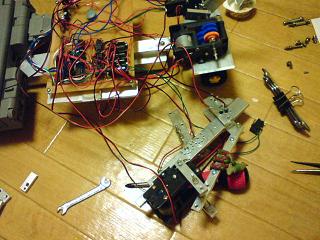
具体的には、頭部の重心を前へ20ミリずらした。
その時の改造の都合で、ギヤボックスが寝かせた状態から立った状態になった。
これで頭部が常に前に傾こうとするから、バックラッシが以前よりは気にならなくなるはず。
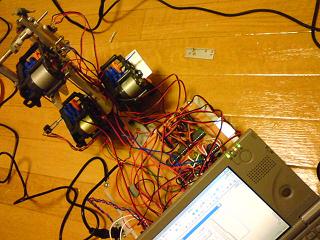
9月1日
動作テスト。
よしよし、だいぶ進歩があったぞ…。