プログラム作成と回路の手直し

どこをどう動かすとどういう動作をするのか調べる。

何日も調べる。
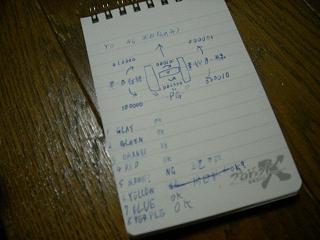
そして、モーターがちゃんと正典逆転をするかも調べる。
それと、回路の構造上、モーターが1個増えるたびに準備できる時間が4倍になるため、ひどい場合にはトイレに行って用を足して手を洗って戻ってくるまでモーターが回せないという問題が発生するため、その辺も解決させるために改めて回路を組む事にする。

ついでに、うまく動かなかった場所を調べて、半田を付け直したりもする。
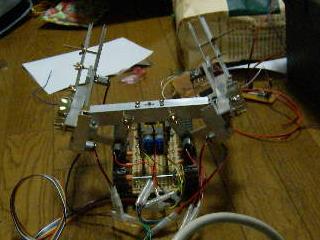
ちょっと原因が分からない異常があるが、何とか動いているぞ。
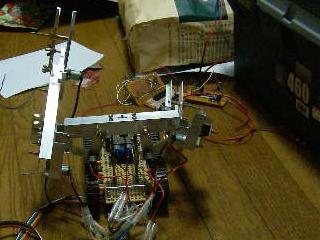
それ!
あ、それ!
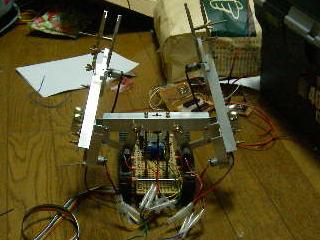
だいぶ使えるようになったところで、新しいパソコンをジャンクから引っ張り出して買う。
WindowsMeが使えるパソコンを出すのだ。
これでやっと、ロボットの制御とUSBカメラの制御が同時にできる…。
とか思っていたら止まりやがった。
Meらしいと言えばそうなのだがねぇ。