10月16日
はい、GE-11に合体するとか言って、
しかし!ロボット製作に形から入った俺は、一度単純な形状の、必要最小限の機能を持ったメカを改めて作ろうと思ったわけですよ!!!
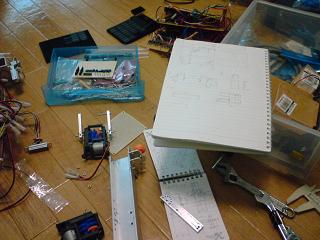
というわけで、部品を引っ張り出して図面を書いて、どんな物体を作るか計画。

そして加工。
電球が切れたので新しいやつを適当に買ってきてつけたら凄く作業場が明るくなって散らかり具合も一目瞭然だぜ!!!

そうして、改めてGE-9の前側の部品を追加工して、さらに新しく部品を作る。
ちゃんと現在の俺の最新技術も導入するぞ。

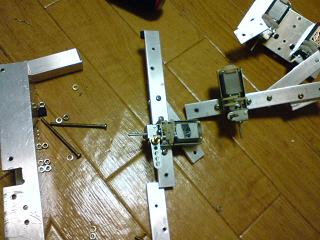
その最新技術の一つが回転式の角度読取装置だ!
左の写真がその要となる部品だ!
何だかこの写真を見ると将来の不安を感じさせるような気がしてならないが俺はやる!
いつもの事だしね!!!

ついでにバラバラになって安置されていたGE-7のギヤボックスを一部失敬。
作った部品のうち、うまく組めた部分を組み上げて、この日は終わり。

10月19日
ギヤボックスの出力軸の位置を調整しなければならなくなった都合で、ギヤ比を変える。
このギヤボックスの未開封状態での在庫が切れ、説明書がなくなってしまったので、半分は勘で組み直す。
これで、満足に走れる…と、信じたい。
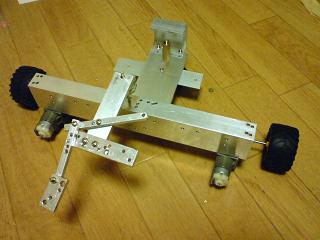
腕の部分もくっつけていく。
さらに失敗したガラクタより部品取り。
近くのドイトが閉店したせいで資材不足気味なんだよ…。
特に厚さ5ミリのアルミ板が手に入らない。

…と、ここで何気なく、子ネジ倉庫を引っ張り出したら大量の余剰材が!!!
これでしばらくは大丈夫かも!
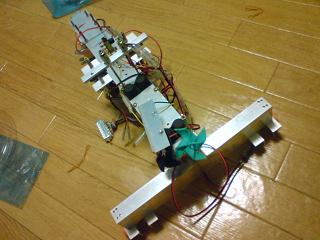
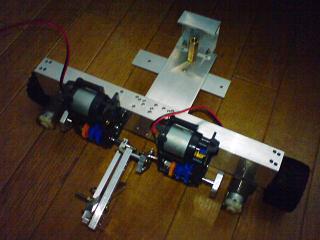
比較的順調に、センサー部分の組み付けも完了した。
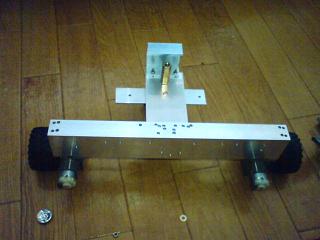
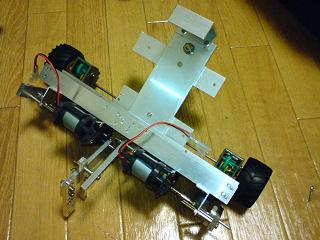
これで本体完成!
現時点では前のめりになっているが、後部に色々色々な部品がくっつくので完成時には後部が重みで下がるはずだ。
下がる事を祈る。

次は電装品の製作だが、今日はここまで。