10月20日
完成を急ぎたいので、平日も少し時間をとりわけて製作する。
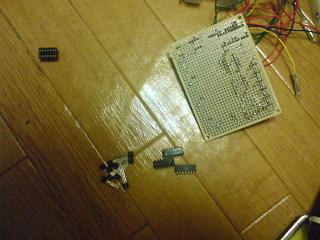
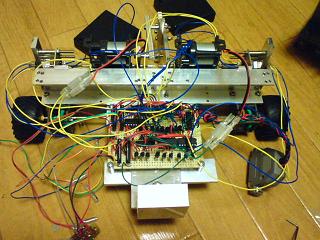
できるだけ省スペースで回路を組みたい。

10月21日
仕事中にふとひらめいて、せっかく昨日半田付けした部分の一部を引っぺがす。
よし、これでIC一個分のスペースが減った、今度は動作確認をしないとね。
10月22日
昨日組んだ回路にプリンタポートのプラグをつけて動作確認をしようと思う。
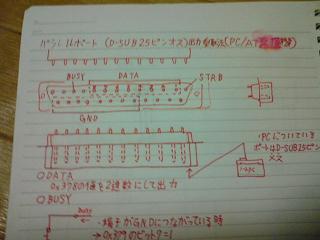
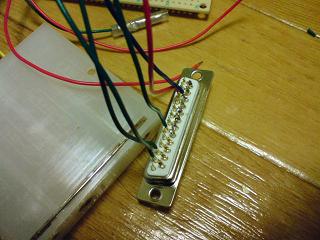
「D-Sub25ピン」のプリンタポートのプラグは、その形状が左右対称なので半田付けするべき場所を右左で間違えないようにする必要がある。
実際、過去にも左右を間違えて正しく動作しない事もあった。
だがしかし!こんな事もあろうかと、左図のように必死に図を描いて、二度と左右のピンを間違えるヘマを起こさないようにしたのだ!
さあ半田付け開始!!!
うわあああああああああ左右を間違えたああああぁぁぁぁ!!!
なぜだああああああ!!!!?????
起動する前に念のためにと他の物体と見比べて、間違いを見つけたのが不幸中の幸いだ…。
なるほど、必死に描いたこの図であるが、結局この図では表から見た絵なのか裏から見た絵なのかが分かりにくいのだ…。
ちゃんとメモ書きを付け足さねば。
起動はまた明日。
10月23日
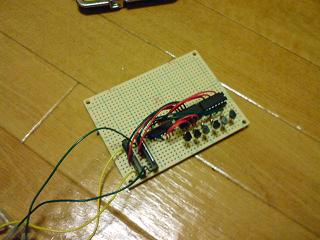
よし、まずは配線の修正だ。

約25分後、配線修正完了!
ついでにスイッチもつけた。
今度こそテストができるぞ!!
モーターとフォトトランジスタをくっつけて、回路が正しいかテスト。
実はまだ配線ミスがあったが、まぁ、何とかなったよ。
10月25日
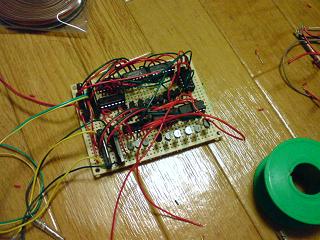
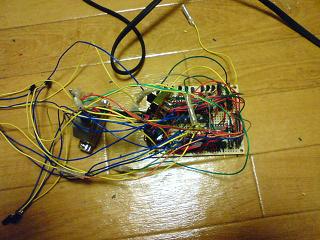
昨日までにできた部分を参考に、残った基盤のスペースにもうひとつ、内容の同じ回路を作る。
午前中にきりのいいところまでやって、午後はお出かけ。
10月26日
次の日に一度、電池ボックスなどの外付け部品を取り外して、細かい部品をどんどん組んでゆく。

プリンタポートのプラグをくっつける。
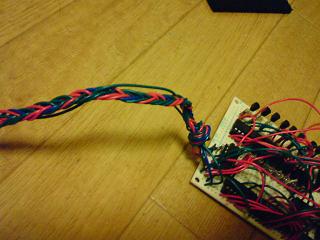
中学校の頃に偶然発見した方法で、複数の線を編んでいる。
電線を追加する必要が出たりして後でほどくような事になると面倒なのだが、まとまっているので絡まる心配が無くなる。
一本だけ電線が足りなかった。
仕方が無い、ここは無理やり配線を追加。
必要ならば後で編みなおそう。
センサーや赤外線LEDをくっつける。
スイッチなども改めてくっつけた。
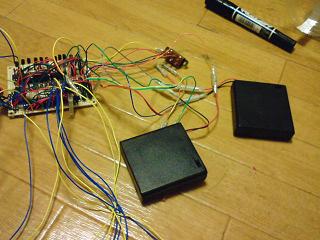
電池をくっつけてテスト起動!

赤外線LEDもちゃんと動作している。
モーターもセンサーもちゃんと動作している!
そして接続だ!!!
10月27日
仕事から帰って来て一休みして、パソコンをこいつに取り付けようと思う。
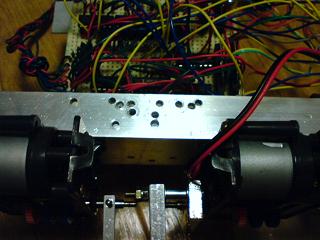
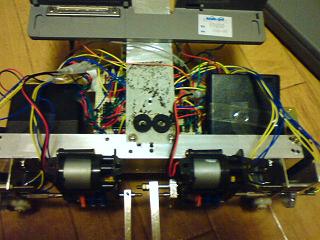
写真に開いている無数の穴のうちのどれか二つが、パソコンを取り付けるのに使える正解の穴だ!!!
部品の再利用だとこういうのが多くてな…。
GE-12に取り付けていたユニットをこちらに移動。
このユニットとパソコンって、タイムボカンのガイコッツみたいだよな…。
でも俺が作っているのはロボットであって自走パソコンではない。
そしてどんなにまちがっても俺が作っているのはロボットであってパソコン運搬車ではない。
そのはずだ…。

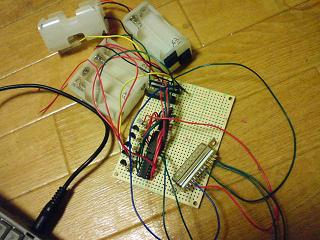
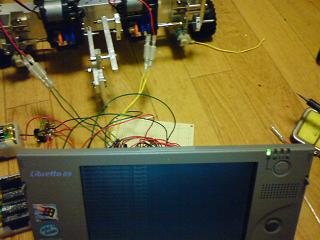
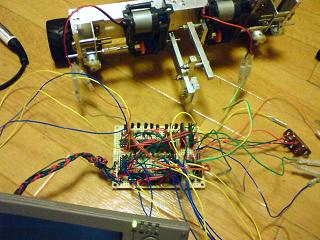
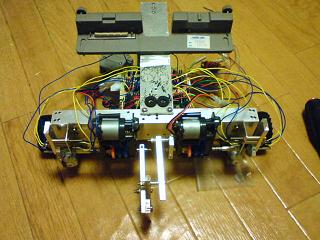
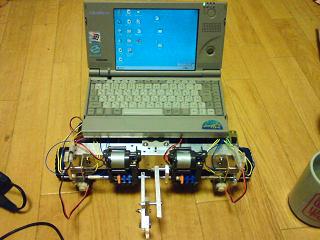
そんなことより基盤から伸ばしたプリンタポートのケーブルが短すぎて繋げない…。
ケーブルをほとんどいっぱいまで引っ張って写真のような状態だ。

結局プラグのカバーを取り外したら、何とかくっついた。
後でこの部分は直そうかな。

そして電池ボックスをくっつける。
現在はセロテープで取り付けているが、あとでちゃんと取り付け法を考えるつもりだ。
そしてパソコンがついに合体するのだ!!!
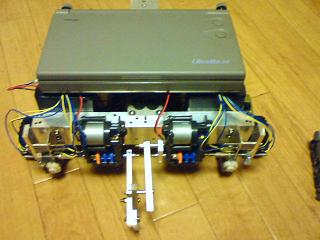
電池ボックスが邪魔でくっつかない。
仕方がないので無理やりセロテープで調整。
待ってろよ、後で直すからな…。

そしてついにくっついた!
細かい部分が残っているけれど、ひとまずは動けるだろう。
動作テスト開始!!!
ついに、うちのロボットが180度方向転換を達成した…。
これがどれくらい凄いかと言うと、いままでのうちのロボットはコンセントで電源を供給していたから、ケーブルが引っかかりそうでできなかったのだ。

だが、問題は残っている、どうもモーター用の電池とIC用の電池を切り離しても、現在の誤動作の問題が解決していないのだ。
今後の課題だな。