11月1日
さて、続きを行こうと言うわけだが。

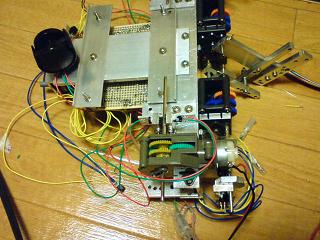
また分解。
センサーを追加したり、回路を改良するのだ。

8mmのドリルでの加工に挑戦。
何とかうまく行った。

これで後部にスイッチと、モーターの電流を手動で制御するボリウムを取り付けられた。
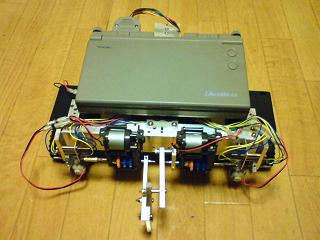
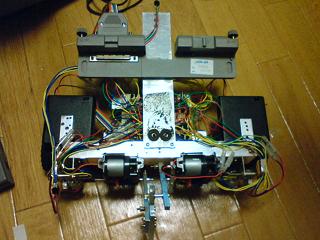
一通り組めた!
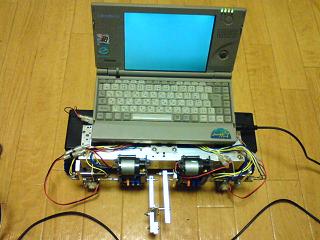
そしてためしで起動。
一応動いているようだが、この写真のあと、電池ボックスは落下…。
両面テープではダメらしい。

タイヤはタミヤのオフロードタイヤセットを取り付けているのだが、ホイールが空回りしたりする。
タイヤとホイールは接着剤で固定しろと言う事なのか?

組んだけどまたばらしている俺…。

11月8日
この日はまず機械の図面取りをした。
大体まとまったらここに公開しよう。
誰かの役に立つのかどうかは知らないが…。

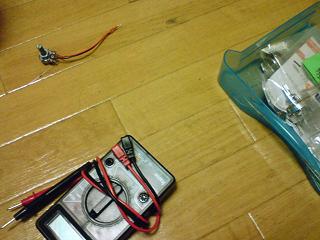
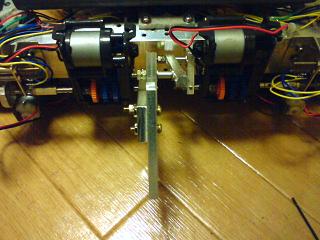
そして今日は追加で、タイヤのセンサーを作るぞ。

形状は、マウスの中に入っている「フォトインタラプタ」と言う部品と同じ機能だ。

赤外線LEDとフォトトランジスタの間に穴の開いたシャフトを通して、半回転ごとにセンサーが反応するのだ。
回路が腕よりも単純だから、すぐ終わるだろう。

…終わらない…。
太さ3mmのシャフトに1.5mmの穴を開けるのは、うちの工作機械では精度がかなり厳しいらしい。

でも、何とか終わったよ。
実際には電子部品を取り付けてどうなるか、なのだが。
でもこれで次に進める。

11月9日
新しい赤外線LEDとフォトトランジスタを用意。
取り付けていく…。
そして赤外線LEDとフォトトランジスタを取り付けた接着剤が乾くまでしばらくお休み。

11月14日
これだけ待てば十分接着剤は固まっているだろう。
ちなみにこの日に俺はこのロボットに何をやったのか、よく覚えていない。
11月15日
今日こそは動作テストだ!
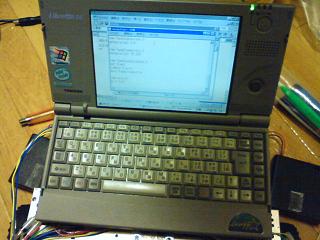
メモ帳でスクリプトを組んだり、

エクセルのマクロを改良したり、
既に俺の頭の忘却の彼方にあるようなことをやったり、

タイヤの原点復帰(所定の位置に戻る事だと思えばいい)が成功した!
そしてまた問題にぶち当たり…。

11月16日
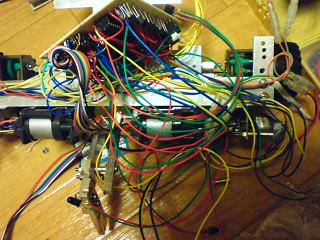
昨日ぶち当たった問題は、腕の原点復帰に問題があった。
エンコーダの穴を塞ぐ事を試みる。

上の写真ではセロテープに油性ペンで黒く塗って穴を塞ごうとしたがうまく行かなかったので、紙をセロテープで貼り付けた。
これでうまく行った♪

よーし、八割方うまく行ったぞ〜♪

11月17日
もう少しプログラムを改良して、これで良さそうだ…。
やっと、ここまで来たのか…。