
さ〜て、給料も入った事だし、始めようかね。

で、この間まで作った本体がこれ。
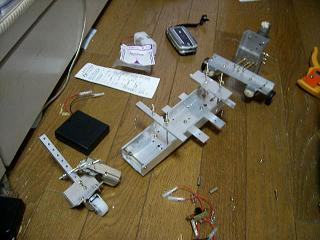
また解体…。
もういい加減、解体と合体はできるだけ少なくしたいのだが…。

胴体部分は以前に別の物体を作ろうとしていた材料を使いまわしているので、しかも試作穴を開けまくったので、穴ぼこだらけだ。
さらにここに、追加で配電盤固定穴を開けるのであった。
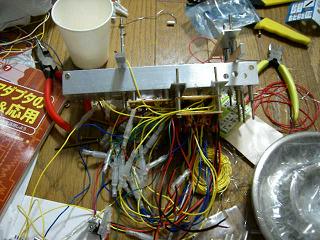
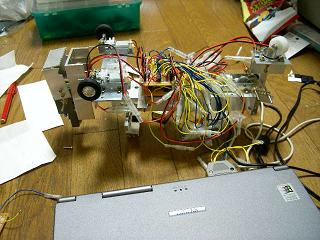
そうして、ここに制御部品をくっつけて、制御部品を繋いでいくわけだが…。

一休み。
今まで寮の一階の自動販売機で飲み物を調達していたが、金欠のあおりを受けて大型ペットボトルにしたぞ。
うーん、300円ちょっとで想像以上に物持ちがいい、これからもこれを続けよう。

組み立てて繋ぎまくって、ひっくり返すと毛むくじゃらの腹…。
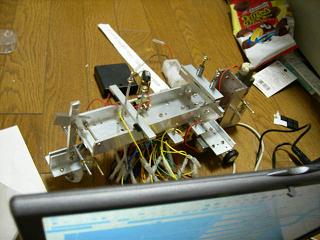
ちゃんとこれで走れるだろうか。

なんか、意外に何とかなりそうだ。

で、ここに中央制御コンピュータを配置するわけだが…。
ロボット制御に関しては、巷では「マイコン」なるものが流行っているようだが、俺にはよく分からん。
そして動作テスト。
…動かねぇ…。
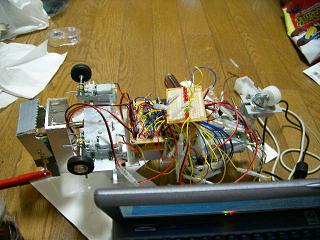
配線接続ミスを調べていてもらちが明かないので、テストボードで調査だ。
うーん…。
色々調べた結果、プリンタポートの端子のつなぎ間違いらしい。
ちくしょー!文献め!表なのか裏なのははっきりしやがれ!!!
まぁいい、動作を確認したところで、制御用パソコンにデータを簡単に送る方法を考えなきゃならないので、今日のところはこれでおしまい。

GE-9に搭載するカメラを買ってきたぞ。
今回はジャンク品ではなくて中古品なのでそれなりの動作が期待できるだろう。
GE-7のカメラ、結構素性が悪かったからな。

ついでに、GE-9には口がついていて鋭い歯があるので、こんなステッカーを買ってきた。
どこに貼ろうかなぁ。
…しまった、アタッチメント取り付けようの長ナットを買い忘れた…来週だな…。