そしてその後、もうちょっと内容を充実させようと思ったまま押入れにしまって半年を軽く越えてしまった。
が、余裕ができた今こそこのとき!
そしてこれをやったら、ひとまずばらしたサーボモーターを再組み立てして使おうと思ったんだ。

うわああああああああああああああああ錆びているううううううううううう!!!!
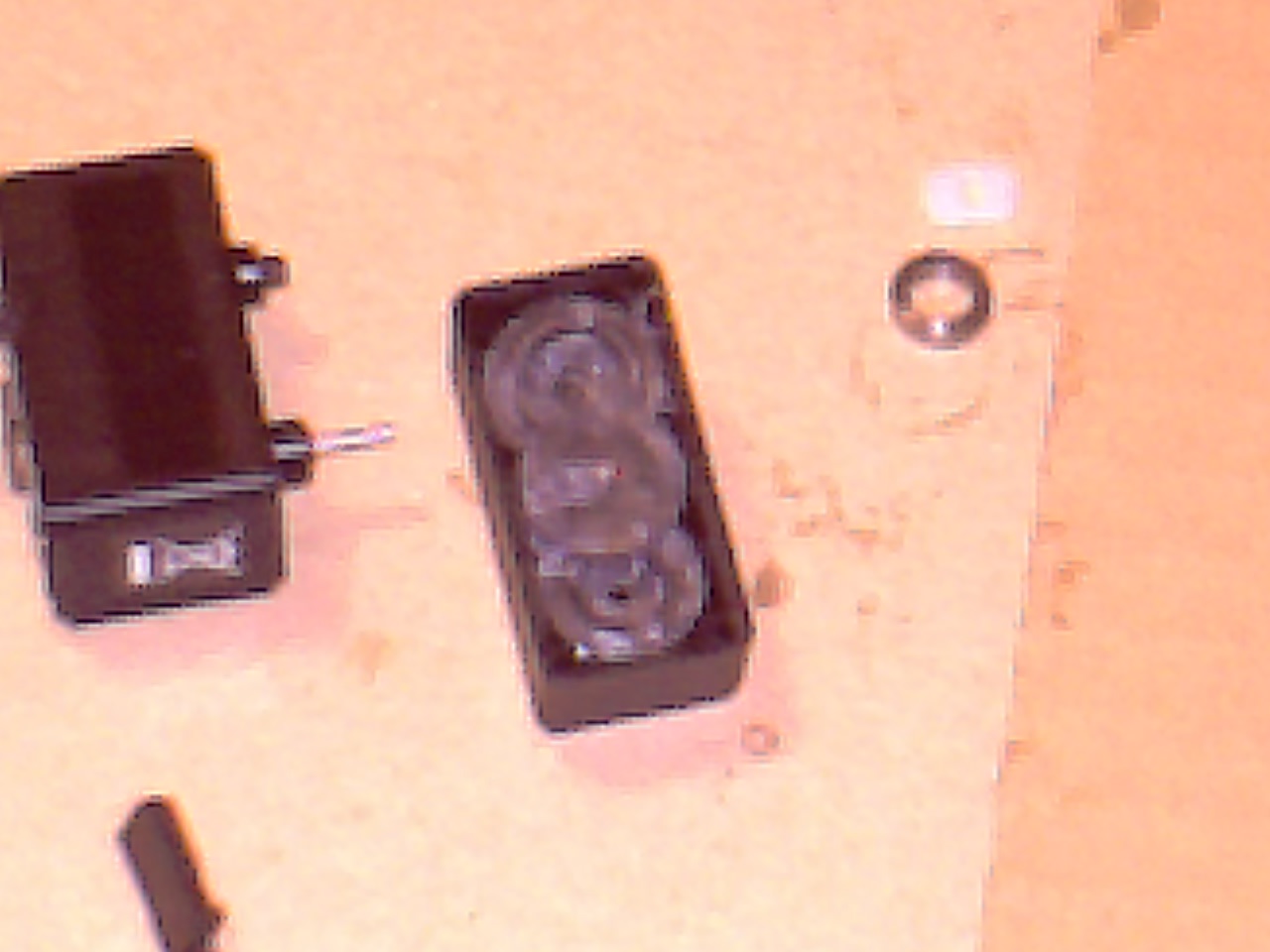
ちなみに上の写真の丸い得体の知れない物体であるが、左の写真の右上の輪っかがかつての姿らしい。
どうやらベアリングのようだ…ちなみに左の写真はうちの別のカメラで撮影したものだが、左の写真をクリックすると何でこの期に及んで俺が携帯のカメラで撮り直したのかが分かるぞ!!!、

何とか以前に解体した時くらいにバラせたから、このページを作るくらいには話を進められるだろう。

まずはサーボモーターの電装品とモーターだ。
基盤はモーターにくっつけられて半田付けされていたが、半田ごてで取り外した。
モーターはものすごくしっかりくっついていて全然取り外せず、また基盤部分も小さいIC等が付いていたりするので、細かい部品まで引っぺがすのは断念した。
故にどんな回路になっていてどういう動作のルールを持っているのかまでは分からなかったが仕方が無い…。
基盤から伸びている黒い部品が、モーターの角度を読み取るエンコーダだ。

モーターの付いている部品を上の状態からひっくり返すとこんな風になっている。
右側のシャフトの刺さる穴の下に、モーターの軸にくっついている小さい歯車が隠れている。

その小さい歯車にかみ合うように、この平べったい歯車がくっつく。

その平べったい歯車の右に、背の高い歯車が乗っかって、そこにシャフトが刺さる。

今度、左側には、出力軸の付いている歯車の奥の部分を支えるベアリングが刺さる…本来ならば出っ張りに刺さるのだ。
もはや錆びて膨らんでこの写真では入らないのだが…。

そしてその次に、エンコーダの先端と出力軸の付いている歯車がうまくかみ合うようになる白い部品がくっつく。
本当ならば基盤がモーターに半田付けされていてモーターも取り外せないので、つまりはエンコーダは取り外せないようになっているから、この時点でエンコーダの先端にこの白い部品がくっつく事になる。

一方、こちらはモーターの付いていないほうのカバーの部分。
出力軸の付いている歯車にベアリングがしっかりくっついているので、残った二枚の歯車を重ねてカバーにくっつける必要がある。

最後にこの二つを合体させるわけだ。
このとき、出力軸の付いた歯車と、エンコーダを繋ぐ白い部品がうまくかみ合うようにして合体するのだ。

ちなみにカバーの中では、歯車はこんな配置になる。
力の伝達順序は、
1、右下に隠れているモーターの力が中央下に隠れているギヤに伝わる。
2、その中央下に隠れているギヤの力が右上の大きめのギヤに伝わる。
3、右上の大きめのギヤの力が中央上のギヤに伝わる。
4、中央上のギヤの力が最後に出力軸の付いた大きいギヤに伝わる。
こうして、7kg・cmを超える大きなトルクが出るというわけだ。
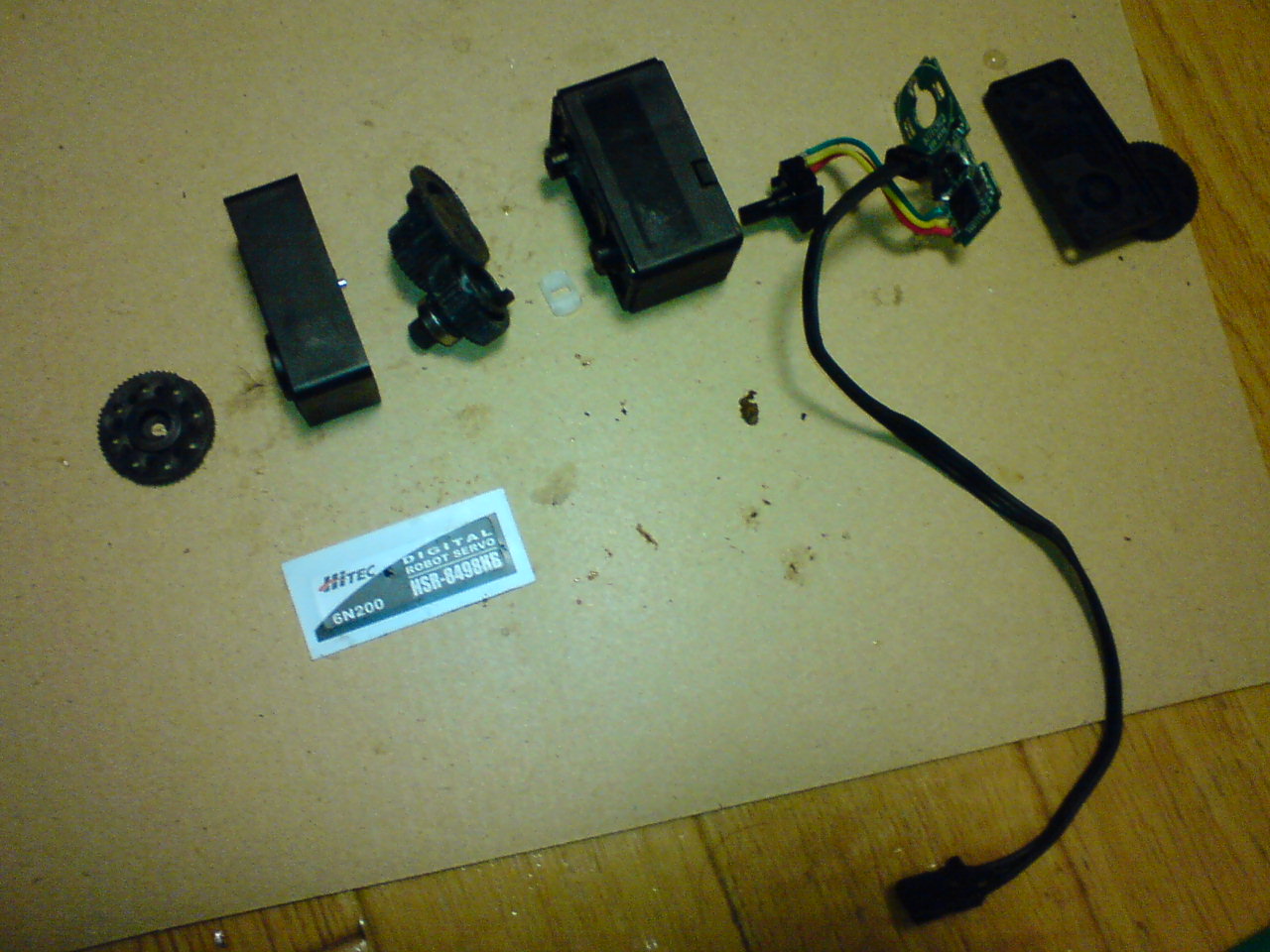
分解した状態のサーボモーターを一セット並べるとこんな感じになる(なお、ネジは写っていない)。
写真をクリックすると拡大できるぞ。
多分このページの2番目の写真と同じ解像度だが、携帯のカメラで撮ったほうがよほど性能が良い事が分かる。

さて…この錆びて脂ぎっているネジやらベアリングやら、このモーターをしまっておいた袋やらをどうしようか?
それにしてもこの袋、腐食して臭い…。
このページ作成の利益を度外視した場合、損失約2000円であった。